Sparse Motion Capture
Abstract
Human pose estimation involves tracking the position and orientation (pose) of body segments, and estimating joint angles. It finds application in robotics, virtual reality, animation, and healthcare. Recent miniaturisation of inertial measurements units (IMUs) has paved the path towards inertial motion capture systems (IMCs) suitable for use in unstructured environments. However, commercial IMCs attach one sensor per body segment which can be considered too cumbersome for daily use. A reduced-sensor-count (RSC) configuration, where IMUs are placed on a subset of body segments, can improve user comfort while also reducing setup time and system cost. Developing a comfortable IMC for routine use can facilitate interactive rehabilitation/performance improvement, and the study of movement disorder progression to enable predictive diagnostics.
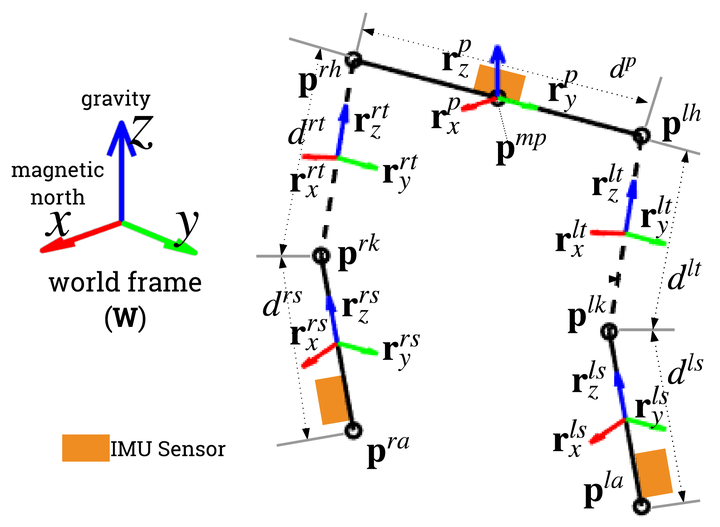
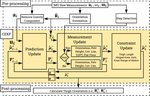
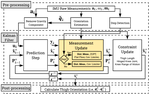
This work presents a motion capture algorithm that utilises biomechanics constraints and balance assumptions to infer information lost from using less sensors. Specifically, it presents a novel use of Lie group representation of pose alongside a constrained extended Kalman filter for estimating pelvis, thigh, and shank kinematics during walking using only three IMUs. It iteratively uses linear kinematic equations to predict the next state, incorporating uncertainty in IMU measurements, indirect observations and assumptions (pelvis height, zero-velocity update, flat-floor assumption), and biomechanical constraints (e.g., hinged knee joints).
The algorithm was evaluated on nine healthy subjects who were asked to walk freely, jog, and jump within a $4 \times 4 m^2$ room. The mean position root-mean-square error relative to the mid-pelvis origin was $ 5.75 \pm 1.4$ cm, while the sagittal knee and hip joint angle correlation coefficients were $0.88 \pm 0.1$ and $0.77 \pm 0.1$ indicating promising performance for joint kinematics in the sagittal plane. The algorithm can compute gait parameters in real-time and can be used to inform gait assistive devices.
This work develops an algorithm that tracks lower body motion using fewer sensors (i.e., inertial measurement units) towards developing a comfortable motion capture system for daily routine use. This technology can contribute towards facilitating interactive rehabilitation/performance improvement, and the study of movement disorder progression to enable predictive diagnostics.
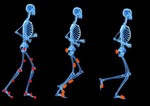
Sample Reconstruction for walking motion (Left = benchmark/Vicon, Right = my reconstruction)
Sample Reconstruction for jogging motion (Left = benchmark/Vicon, Right = my reconstruction)
Sample Reconstruction for high knee jog motion (Left = benchmark/Vicon, Right = my reconstruction)
Posts
PhD code documentation
Talks
Estimating Lower Limb Kinematics using a Lie Group Constrained EKF and a Reduced Wearable IMU Count
Estimating Lower Limb Kinematics Using Distance Measurements with a Reduced Wearable Inertial Sensor Count
Sparse Motion Capture: Comprehensive and Accurate Estimation of Lower Body Movement Using Few Wearable Sensors
