Estimating Lower Limb Kinematics using a Lie Group Constrained EKF and a Reduced Wearable IMU Count
Luke Wicent Sy, Nigel Lovell, Stephen Redmond
Motion Capture
Animation
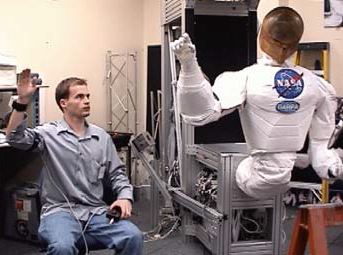
Teleoperation
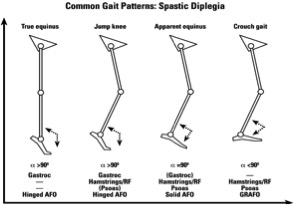
Cerebral Palsy Surgery
Perform. Improvement
Fall risk assessment
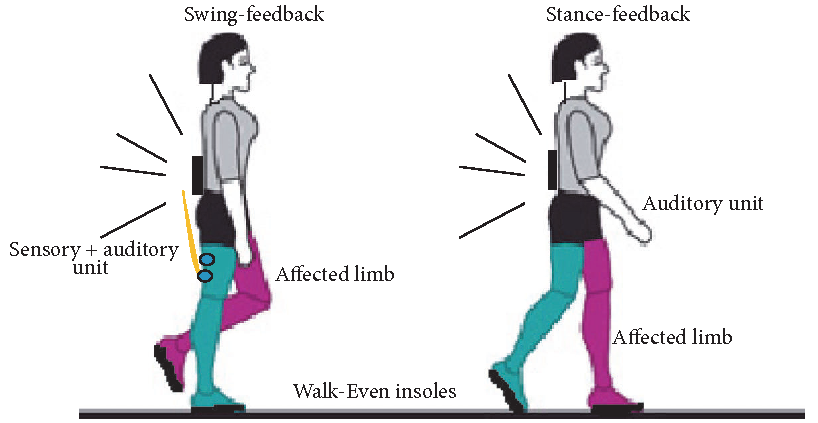
Real Time Feedback
Motion Capture Systems
Camera based
Very accurate but limited to a small space
Inertial Measurement Unit (IMU)
Miniaturization. Track position and orientation (albeit with drift).
IMU based (one sensor per seg)
Can capture almost everywhere. Can be conspicuous for everyday use
Wearable based
More comfortable
Soft stretch sensors
More & smaller IMUs
Sparse sensors
Wearable based
More comfortable
Soft stretch sensors
More & smaller IMUs
Sparse sensors
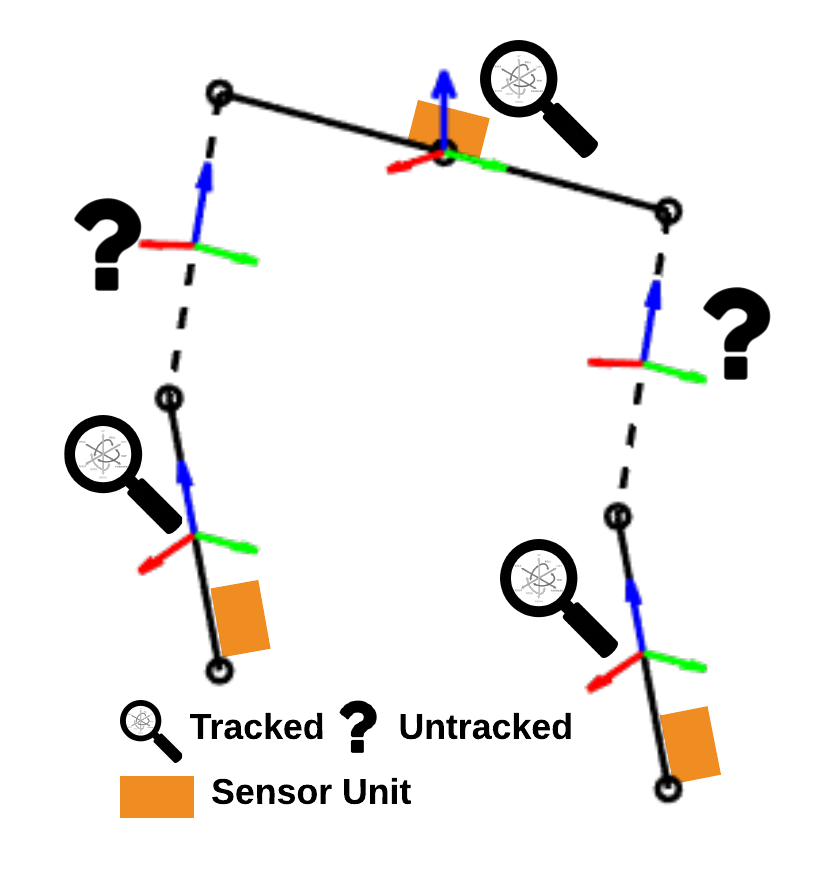
Sparse Wearable Challenge
Goal: Comfortable, Fast, and Accurate Motion Capture System
One sensor per segment.
Less sensor = Missing info
Infer through biomechanical constraints
Infer through biomechanical constraints
Infer from additional measurements
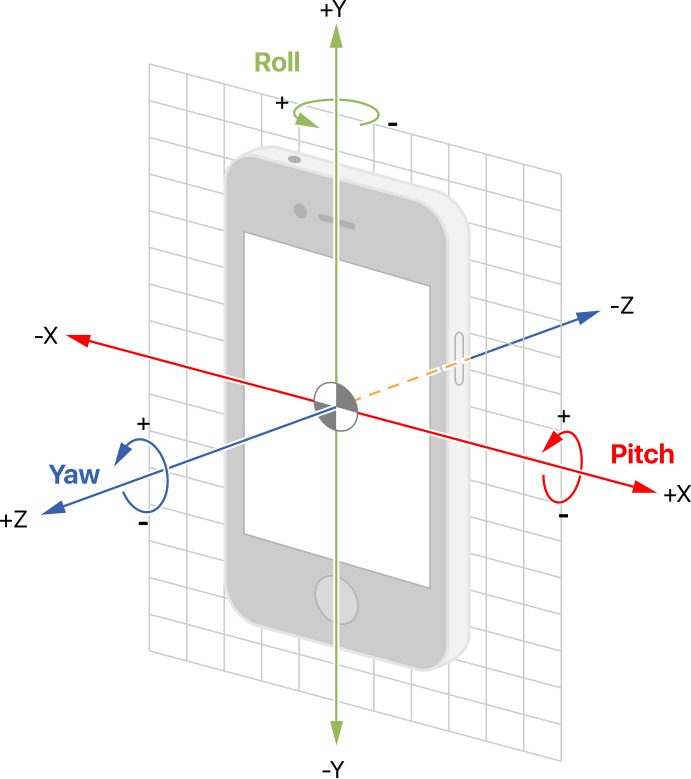
Pose Tracking Challenge
specifically, tracking rotation
Rep.
Vars.
Singularity
Constraints
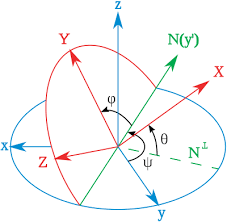
Vector rep.
Diff. geometry rep.
Euler angles
3
Y
N
N
Rotation Matrix
9
N
Y ($R^TR = I$)
N (Lie algebra)
Quaternions
4
N
Y ($||q|| = 1$)
N (Clifford algebra)
$ R = \begin{bmatrix} \cos(\theta) & -\sin(\theta) & 0 \\ \sin(\theta) & \cos(\theta) & 0 \\ 0 & 0 & 1 \end{bmatrix} $
$ q = \begin{bmatrix} w & x & y & z \end{bmatrix} $
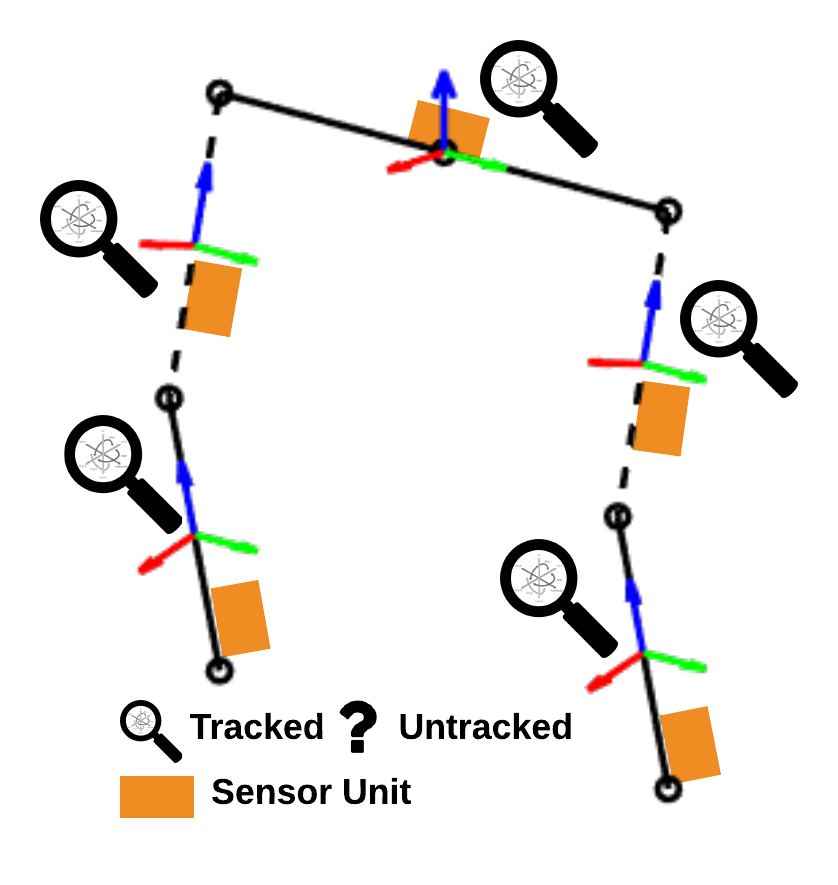
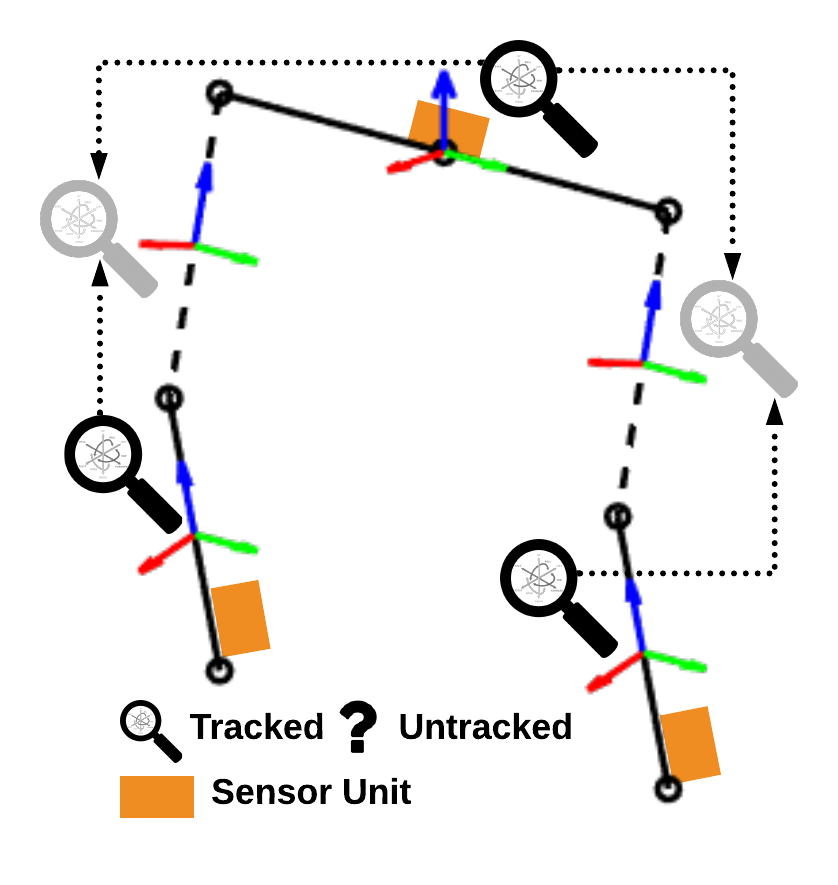
Sparse Constrained KF (CKF)
Algorithm overview of prior work
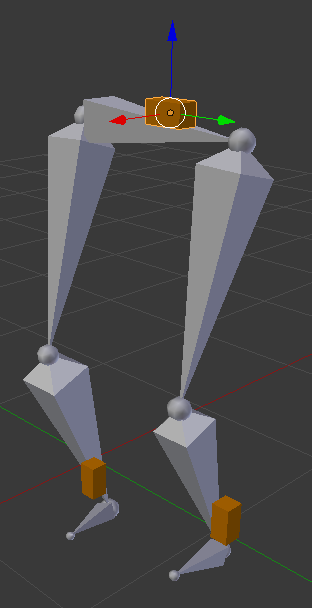
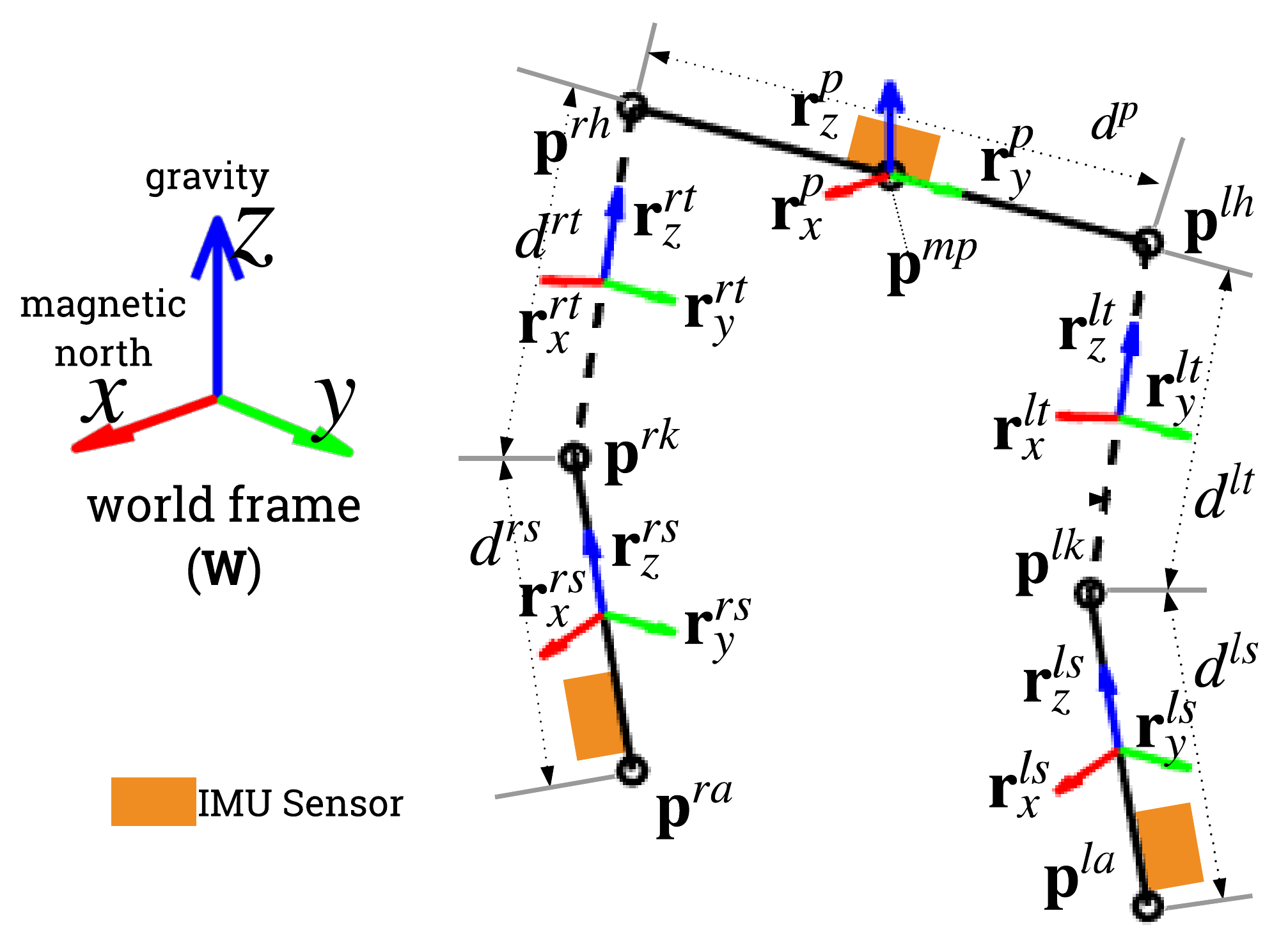
Body Model:
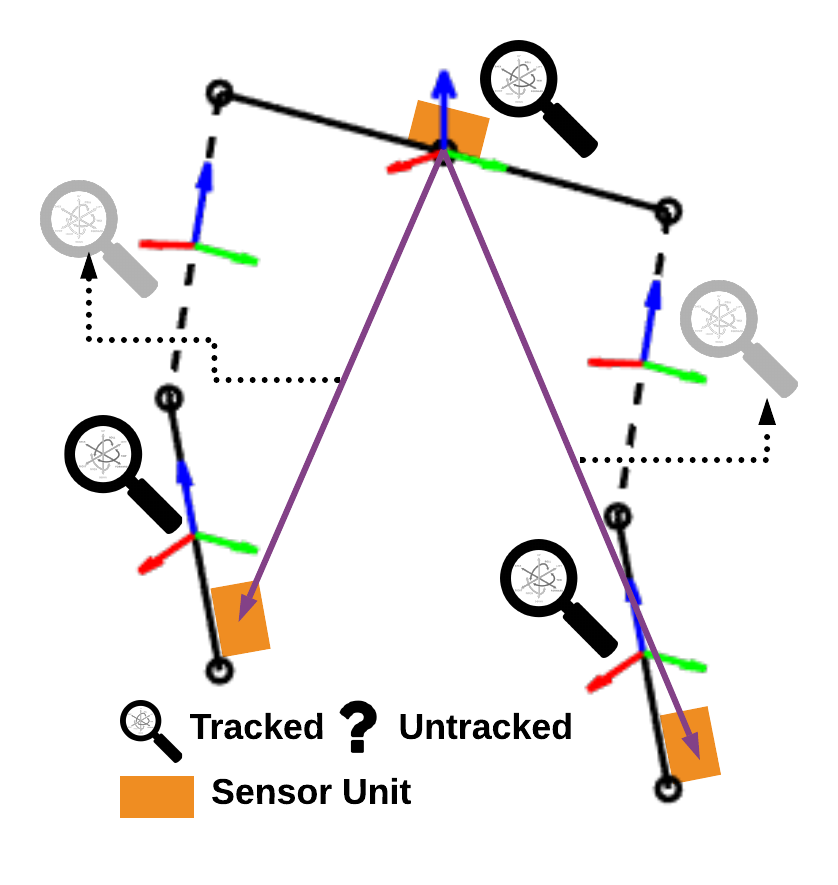
Sparse Lie Group CKF (LGCKF)
Algorithm overview of prior work
Body Model:
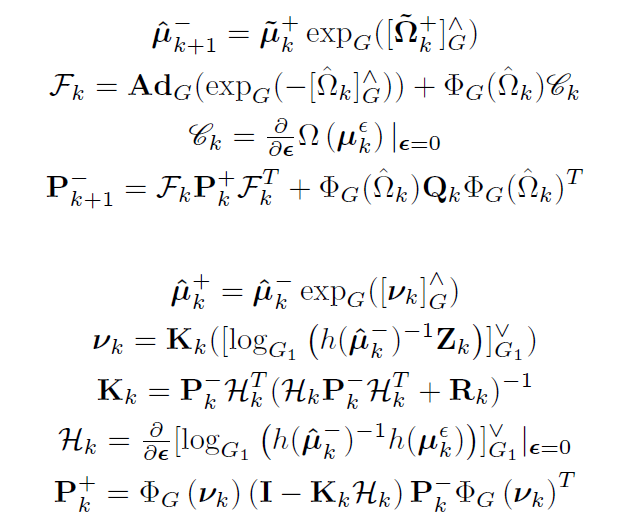
Lie Group Formulation
Sparse Lie Group CKF (LGCKF)
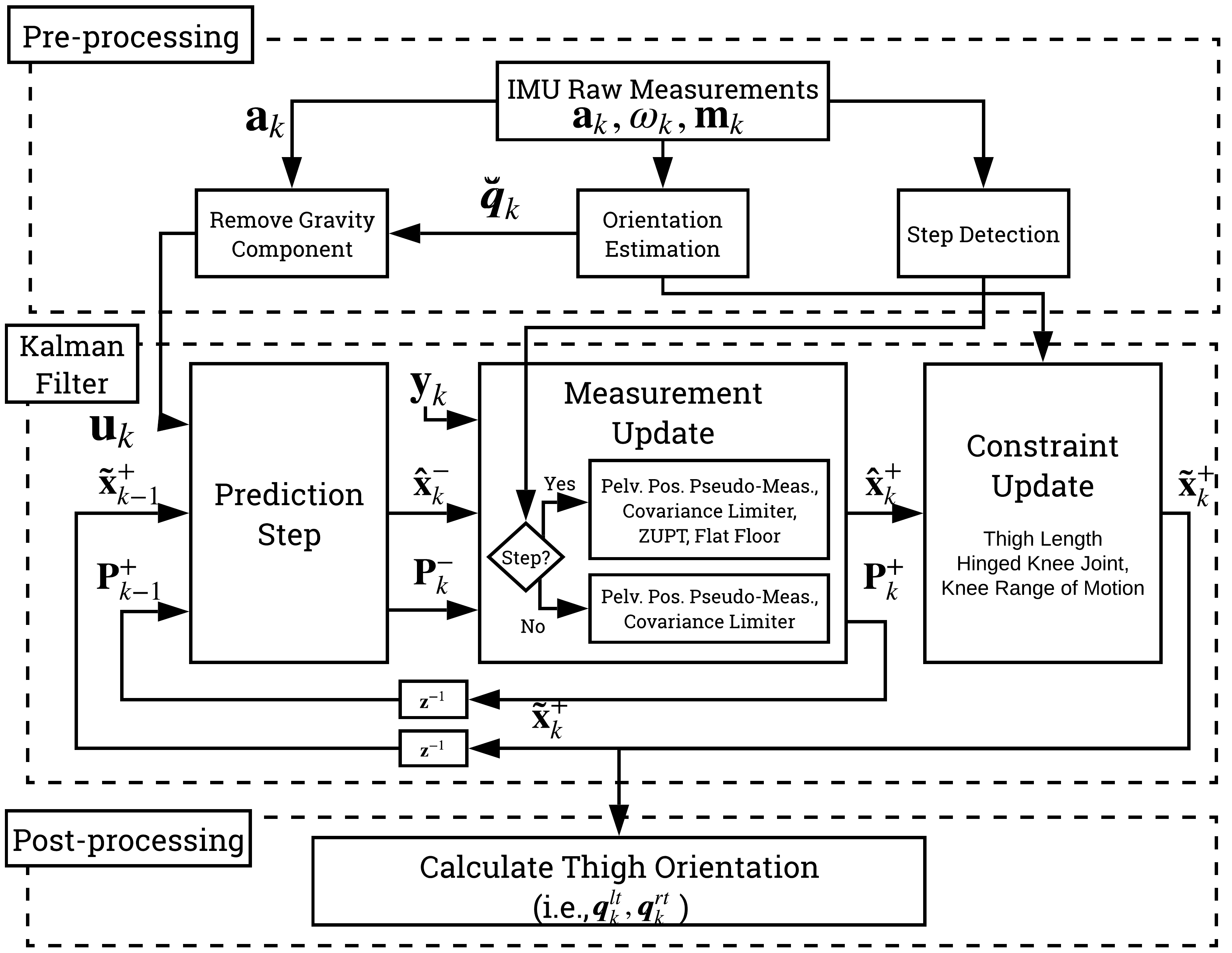
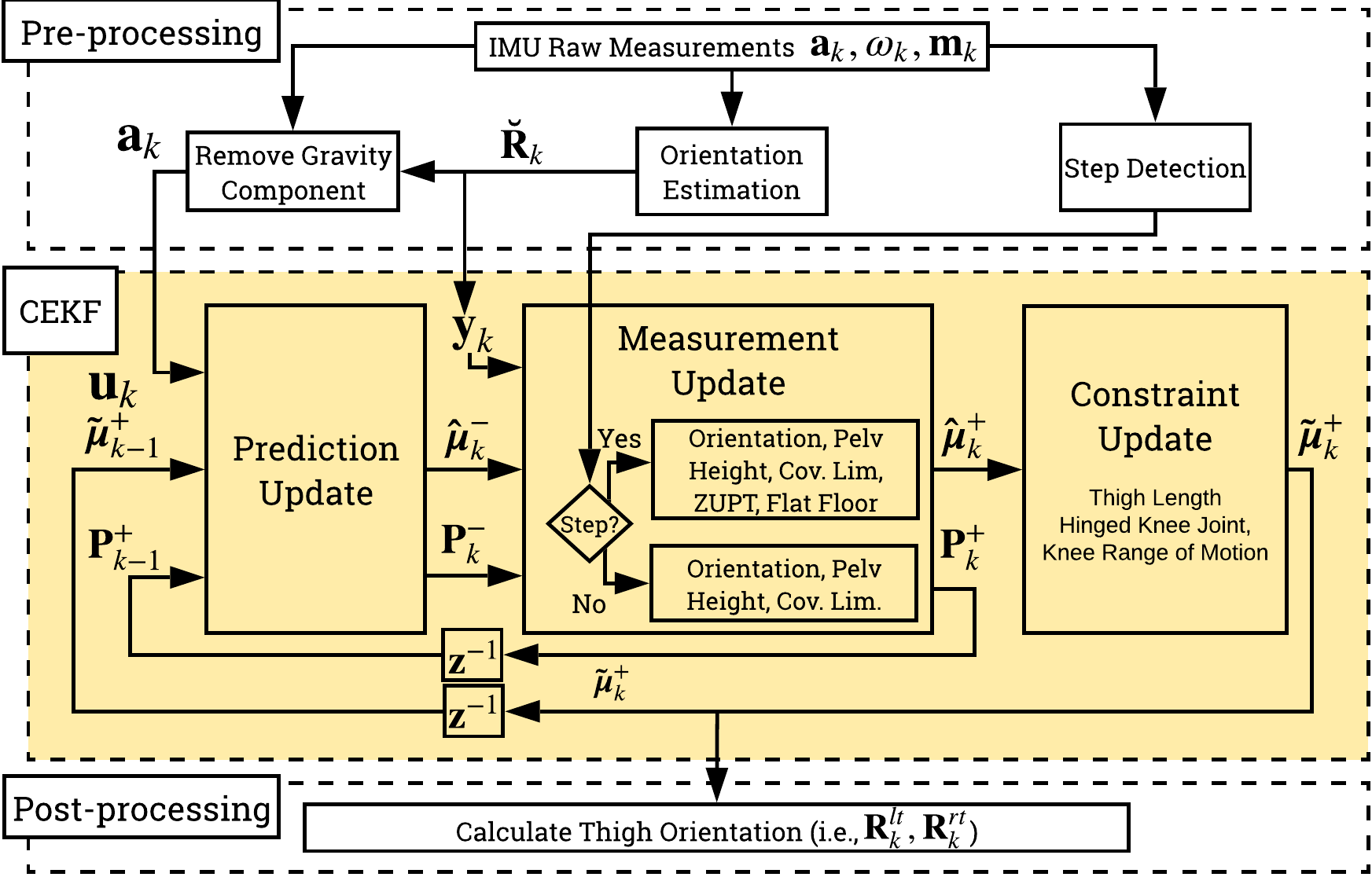
Algorithm Description
Prediction update
• Input: acceleration from IMU, zero angular velocity for simplicity
• Kinematic equations relating input to position and orientation
Measurement update
• Orientation from IMU
• Pelvis height (close to standing pelvis height)
• Zero velocity update (ankle velocity = 0)
• Flat floor assumption (ankle global z position = 0)
• Covariance limiter
Constraint update
• Constant segment length (thigh)
• Hinge knee joint
• Normal knee range of motion
Pred.
Pred.
Meas.
Pred.
Meas.
Cstr.
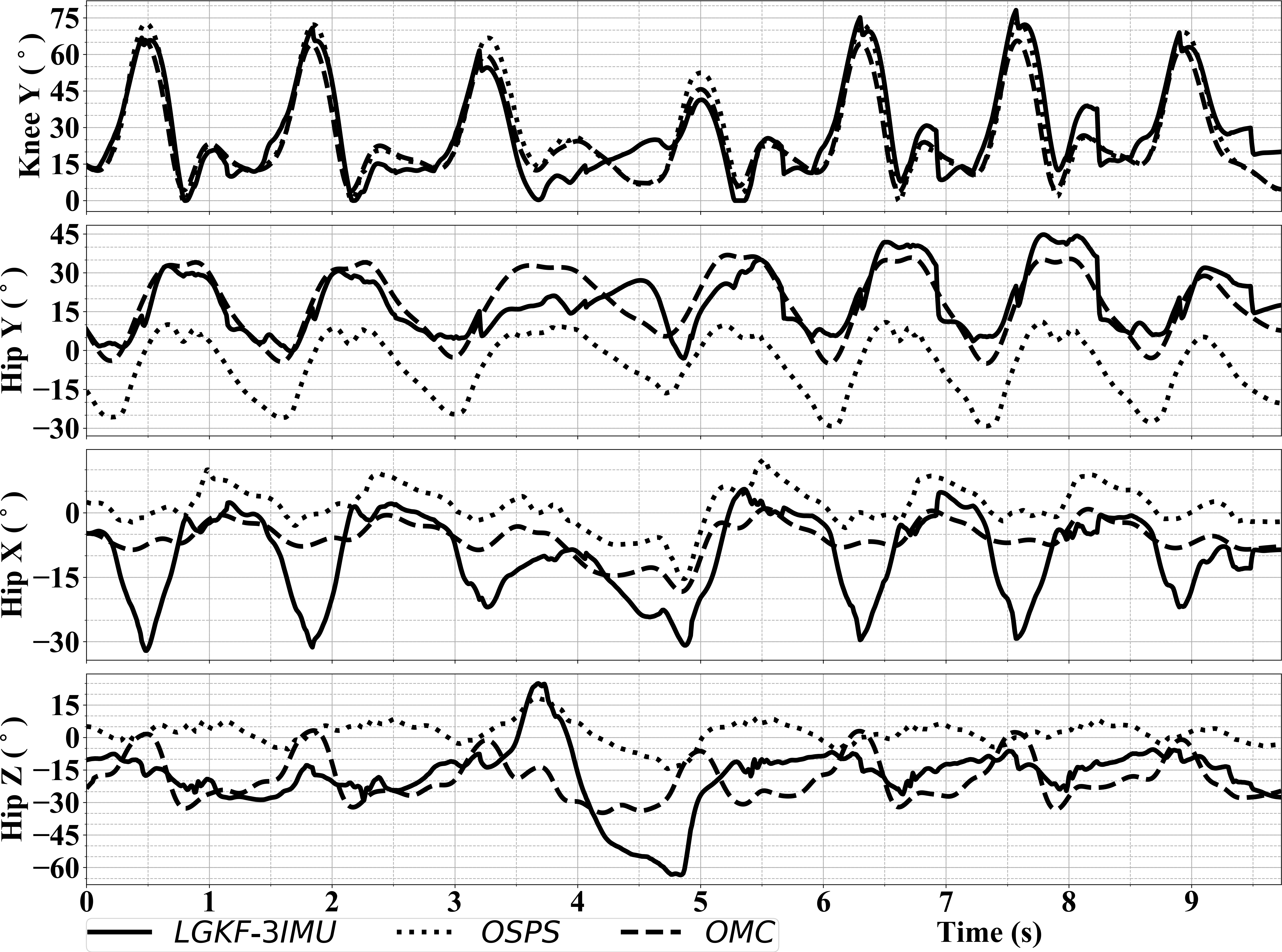
Sparse LGCKF - Sample
Tested on actual IMU data from Sparse CKF dataset (walking, high knee jog, jog, jumping jacks, speedskater).
For walk, most deviation is at the turning motion ($t=3.5 - 5$s).
Sparse LGCKF - Sample
Increase in performance in dynamic movements. Captures sagittal knee angles better.
Sparse LGCKF - Sample
Jumping jacks and speedskater
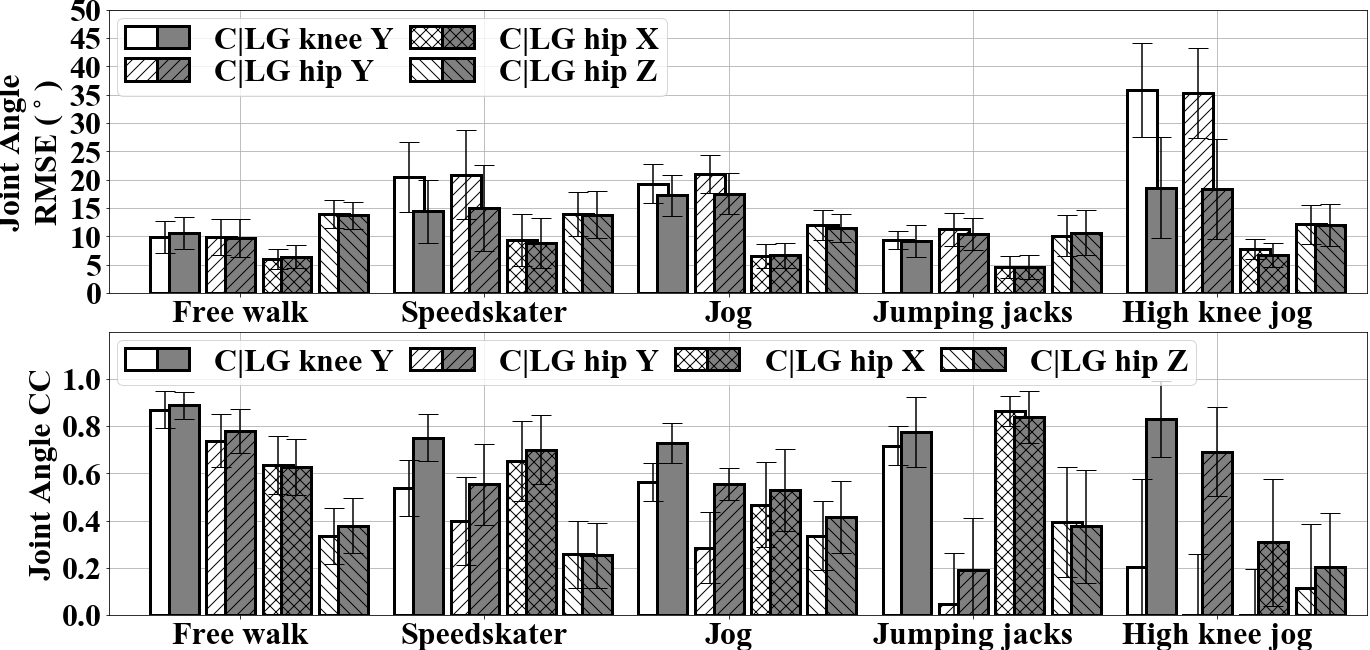
Sparse LGCKF - Results
Below shows the joint angle rmse and correlation coefficient for knee and hip joint angles.
C denotes CKF-3IMU and LG denotes LGKF-3IMU
Conclusion & Future Work
Lie group representation for tracking pose is indeed a promising approach