Estimating Lower Limb Kinematics using Distance Measurements with a Reduced Wearable Inertial Sensor Count Luke Wicent Sy , Nigel Lovell, Stephen Redmond
Gait Analysis Osteoarthritis
Cerebral Palsy Surgery
Parkinson's Disease
Perform. Improvement
Fall risk assessment
Real Time Feedback
People has long been fascinated by the study of human motion, also known as gait analysis.
Gait analysis has been used in a wide range of clinical application.
Specific examples:
GA changes or reinforces surgical decision making for children with CP.
Gait analysis helps the doctor understand existing gait deviations in cerebral palsy patients.
In sports, it is used for performance improvement and injury
In geriatrics, it can help assess fall risk. Research studies have shown some gait paremeters
are good indicator of fall risk.
Hausdor� etal has shown that stride time variability, an example of a parameter measured for gait analysis, is a good indicator of fall risk.
In rheumatology, it can help diagnose osteoarthritis
In neurology, it can help diagnosis Parkinson's disease, understand gait deviations, and then inform therapy.
In sports, it is used for performance improvement and injury prevention.
Last, gait analysis is integral to gait assistive devices. These devices can provide real time feedback (e.g. haptics) which can help correct
Motion Capture Systems Camera based Very accurate but limited to a small space
Inertial Measurement Unit (IMU) Miniaturization. Track position and orientation (albeit with drift).
IMU based (one sensor per seg) Can capture almost everywhere. Can be conspicuous for everyday use
Wearable based More comfortable
Soft stretch sensors More & smaller IMUs Sparse sensors Wearable based More comfortable
Soft stretch sensors More & smaller IMUs Sparse sensors A very integral technology to do gait analysis are MCS.
MCS is not just used in clinical applications but also in animation, robotics, and VR.
Motion capture is the tracking of the human body, where the system estimates the joint positions and orientations of body segments.Camera based - current gold standard, can reach mm accuracy, but limited to the room. There are a lot of potential for capturing motion in subject's natural environment, Including better understand of disorder evolution OR early intervention. Goal: find tech to enable remote GA. Recent trend is miniaturation of IMUs. With measures acceleration and angular velocity giving us position and orientation estimate, albeit maybe noisy or a lot of drift. IMU based - at least OSPS, can be conspicuous for everyday use. Researchers have taken many approaches in solving this problem. Wearable based - use least amount of sensor possible, hopes of comfort. Sparse Wearable Challenge Goal: Comfortable, Fast, and Accurate Motion Capture System
One sensor per segment.
Less sensor = Missing info
Infer through biomechanical constraints
Infer from additional measurements
There are challenges associated with using sparse sensor units.
In OSPS, each IMU tracks the pos and ori of each segment.
Lose info of uninstrumented segment.
To cope, two ways.
Infer the state of uninstrumented segments through biomech constraints from state of instrumented segments.
Infer the state of uninstrumented segments through additional measurements.
This paper is of this later type, where we explore the use of additional distance measurements.
Sparse Constrained KF (CKF) Algorithm overview of prior work Body Model: Before we can proceed with how we incorporated distance measurements,
I will describe our prior work which we was the base of this new approach.
We tracked lower body segments using 3 imus.
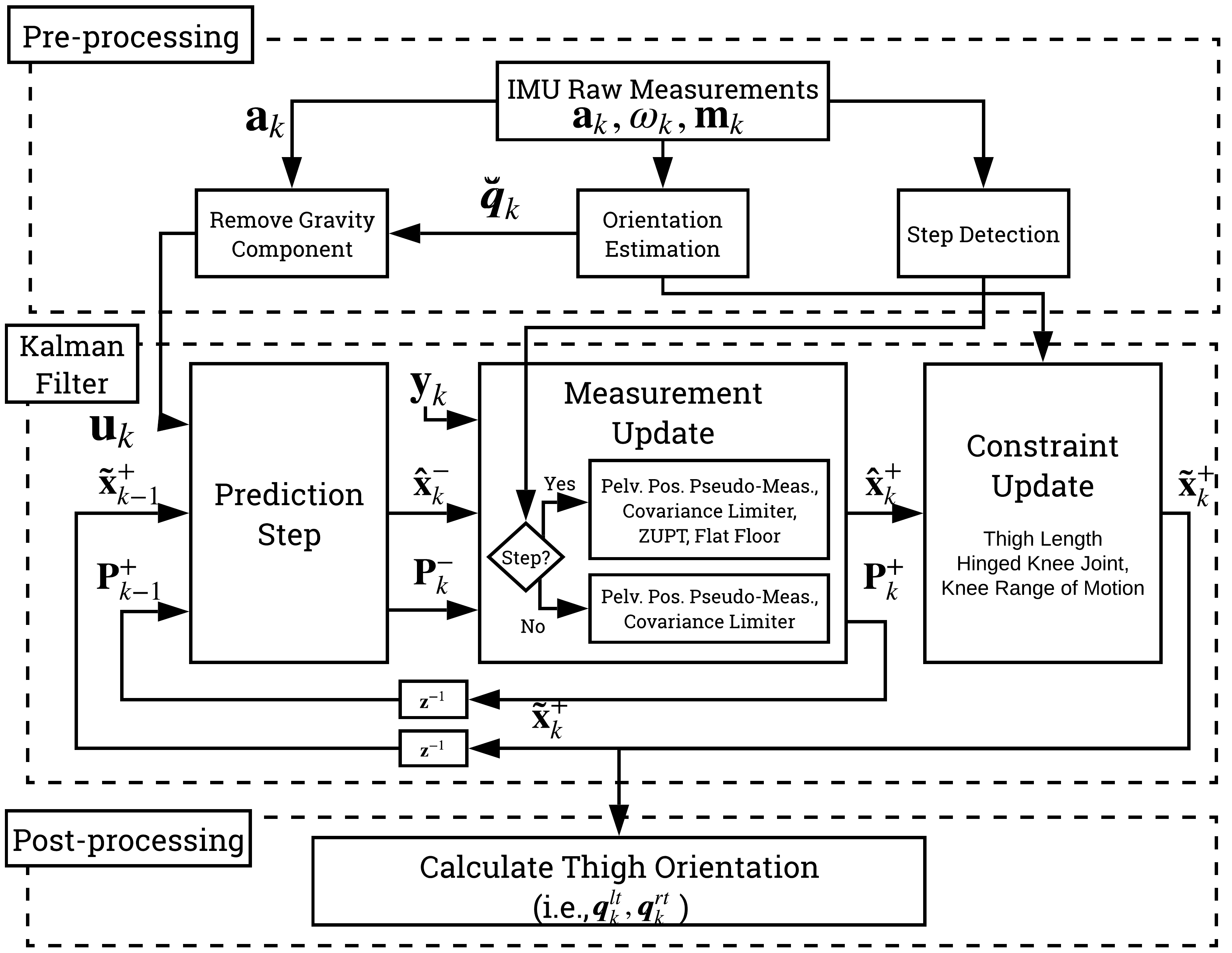
Using a CKF.
CKF takes in input from 3rd party OE and step detection,
and consists pred, meas, and constraint update.
Animation shows what each part does.
Pred tracks object and by itself suffers from segment drift.
Meas is able to bring the shanks closer to the floor.
Cstr looks like a human walking.
Sparse CKF - Sample Result for free walking was promising. Sparse CKF - Weakness To make it work, we need to make assumptions that may not be practical for certain movements (e.g., Activities of Daily Living or ADLs).
However, we needed to make assumptions around pelvis position,
height not stray far from initial height
x y position in between the ankle x y positions.
These assumptions may not be practical for ADLs.
The idea is, wouldn't it be nice if we can capture not just walking but also other movements.
Sparse CKF + Distance Overview Distance measurement which can be obtained through ultrasonic or ultra-wide band radio (UWB).
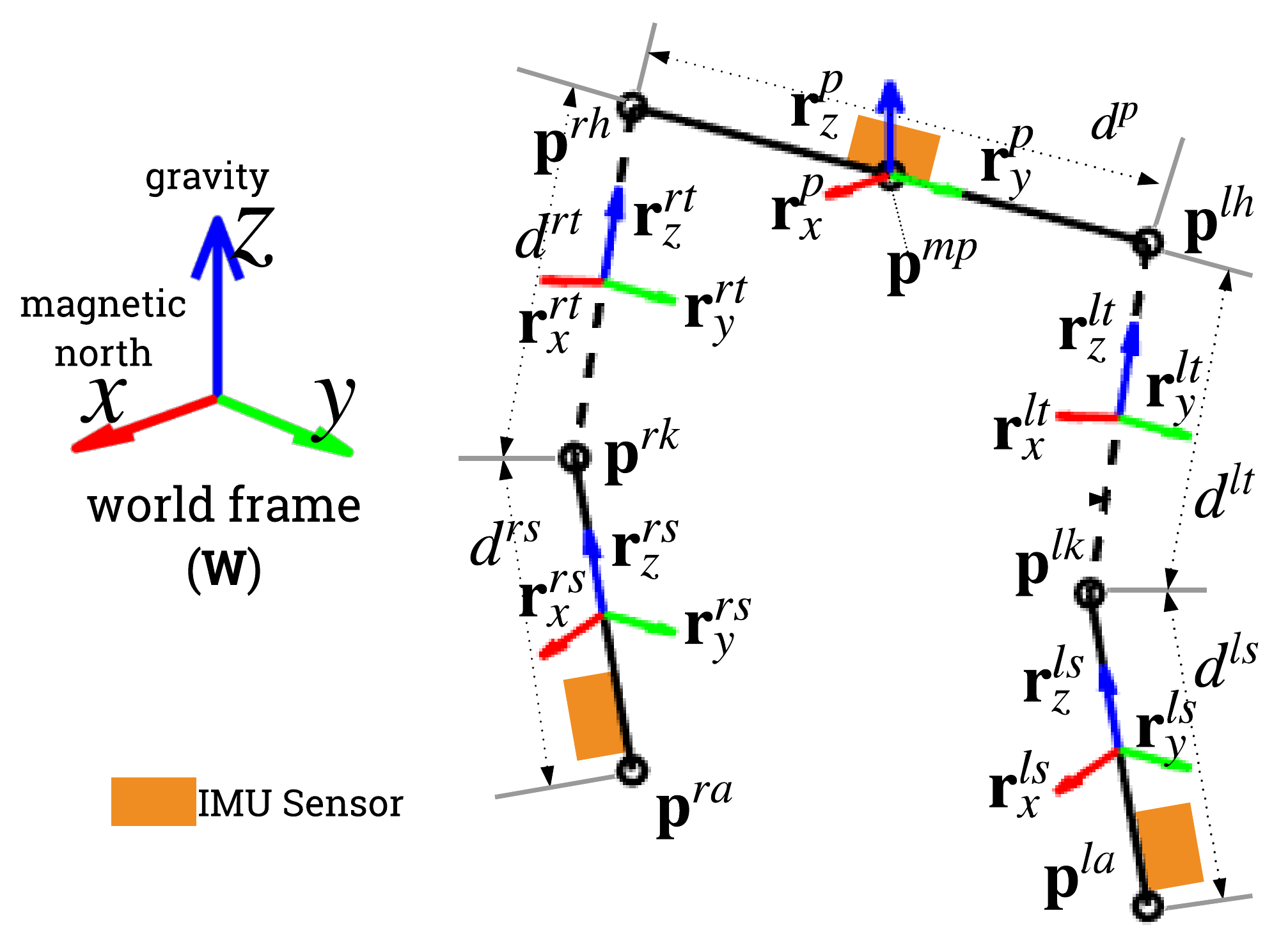
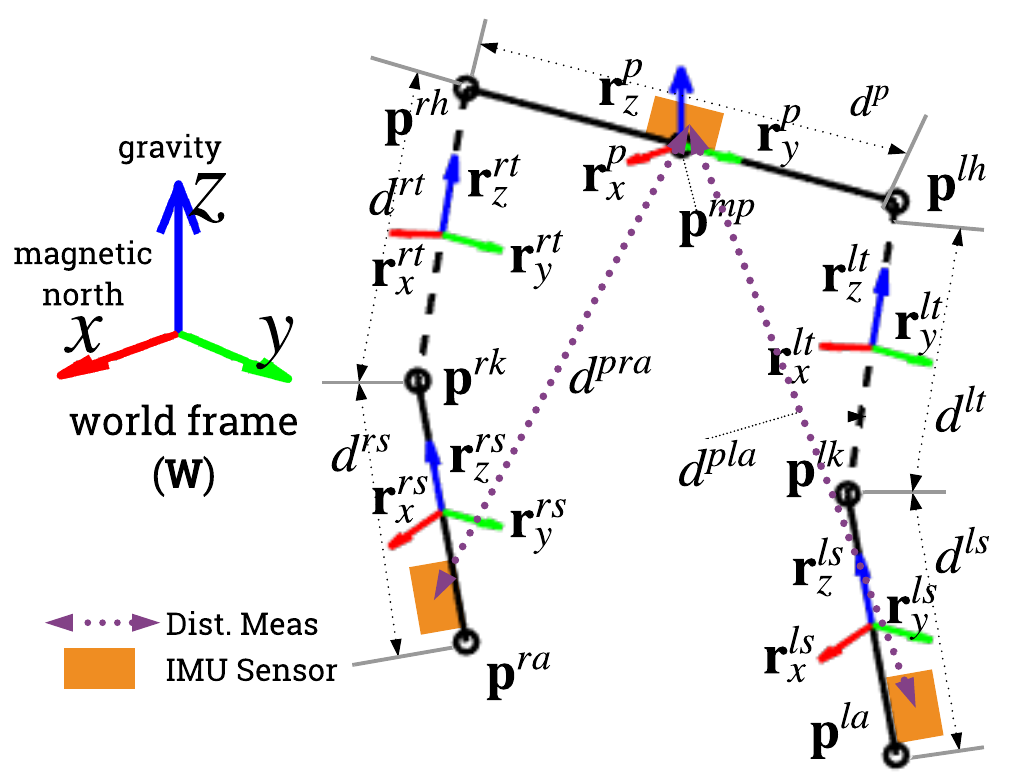
Body Model: This is where additional distance measurements comes in.
We wanted to see if additional distance measurements can improve sparse MCS.
Using similar setup, but remove pelvis related assumptions, exchanging it with distance measurements. Sparse CKF + Distance Remove pelvis related assumptions. Additional measurement model.
$$ \mathbf{H}(\mathbf{x}) = \tau_{k}^{pla} ( \hat{\theta}_{lk} ) \\
General idea of meas model is we convert the measured distance along with our knowledge of position and orientation of pelvis and shanks,
to a pelvis to ankle vector (violet line).
Then use that vector as measurement in our CKF.
We refer the audience to the paper for more details of the maths.
Good to note that we did attempt a nonlinear measurement model using the straigth distance between the pelvis and shanks,
but the experimental results were not promising.
Sparse CKF+D - Sample Tested on actual IMU data + simulated distance measurement from Sparse CKF dataset (walking, jumping jacks, speedskater, TUG, jog).
Most deviation is at the turning motion ($t=3.5 - 5$s).
Good free walking result. Like in CKF, Most deviation is at the turning motion ($t=3.5 - 5$s).
Refer to the paper for more details about the quantitative result.
Sparse CKF+D - Sample Dramatic increase in performance in dynamic movements. Captures Sagitall knee angles better.
The main benefits can be seem in the dynamic movements. Sparse CKF+D - Sample Is able to locate relative position better. Note: TUG = Timed Up and Go.
Is able to locate relative position better.
For example, in TUG trials, the pelvis position was tracked better, in constrast to the plain CKF reconstruction where the pelvis was stuck at chair height Sparse CKF+D - Varying $\sigma$ Simulated at different levels of distance measurement noise $\sigma$ (assumed gaussian). Useful from $\sigma \leq 0.1$ m for walking. Useful from $\sigma \leq 0.2$ m for dynamic movements.
Since we evaluated on simulated distance measurements, we also looked at the performance at different level of distance measurement noise, assumed gaussian sigma.
For walking, distance measurement noise sigma leq 0.1 m is enough to improve results.
For dynamic movements, the distance measurement noise sigma can be even higher.
There was improvement even at sigma 0.2 m.
It is also good to note however that actual distance measurement noise are not gaussian, so the behavior may change in real life.
Conclusion & Future Work Adding distance measurement is indeed a promising approachCan be implemented using ultrasound or Ultrawideband (UWB) based sensors. Simulated distance measurement needs actual validation. Code at
https://git.io/JvLCF Interesting to try with better models and tracking more segments. Infer from distance. Lie Group based 7 segment
This work has shown that adding distance measurement is indeed a promising approach.
Can be implemented using ultrasound or Ultrawideband (UWB) based sensors.
However, validation using actual sensors is still needed.
As part of future work, it will be interesting to use distance measurement with better model representation to track even more body segments.
Preliminary work of tracking 7 body segments using 3 sensor under Lie group representation of the model.
And that concludes my presentation.
Appendix - CKF+D Quant. Results Tested on actual IMU data + simulated distance measurement from Sparse CKF dataset (walking, jumping jacks, speedskater, TUG, jog).