Estimating Lower Limb Kinematics using Distance Measurements with a Reduced Wearable Inertial Sensor Count
Luke Wicent Sy, Nigel Lovell, Stephen Redmond
Gait Analysis
Osteoarthritis
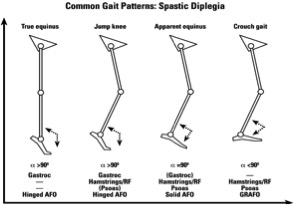
Cerebral Palsy Surgery
Parkinson's Disease
Perform. Improvement
Fall risk assessment
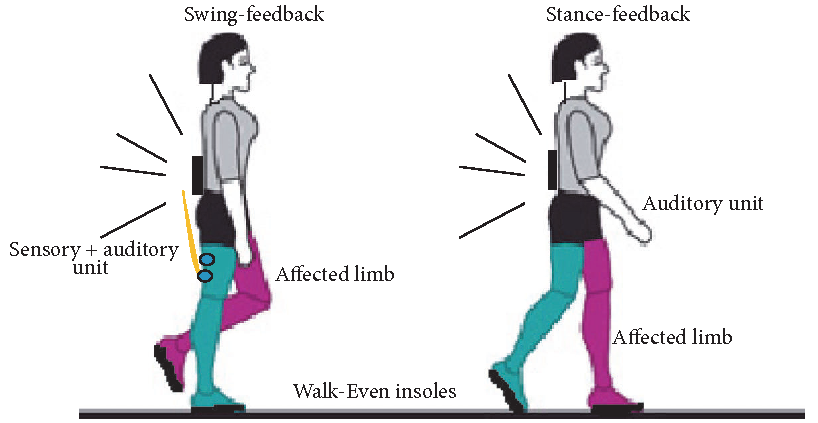
Real Time Feedback
Motion Capture Systems
Camera based
Very accurate but limited to a small space
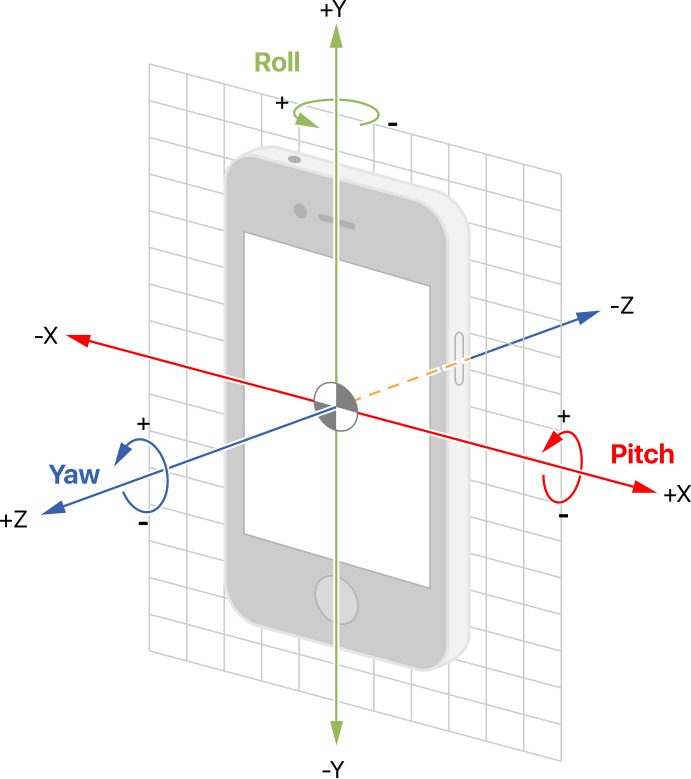
Inertial Measurement Unit (IMU)
Miniaturization. Track position and orientation (albeit with drift).
IMU based (one sensor per seg)
Can capture almost everywhere. Can be conspicuous for everyday use
Wearable based
More comfortable
Soft stretch sensors
More & smaller IMUs
Sparse sensors
Wearable based
More comfortable
Soft stretch sensors
More & smaller IMUs
Sparse sensors
Sparse Wearable Challenge
Goal: Comfortable, Fast, and Accurate Motion Capture System
One sensor per segment.
Less sensor = Missing info
Infer through biomechanical constraints
Infer from additional measurements
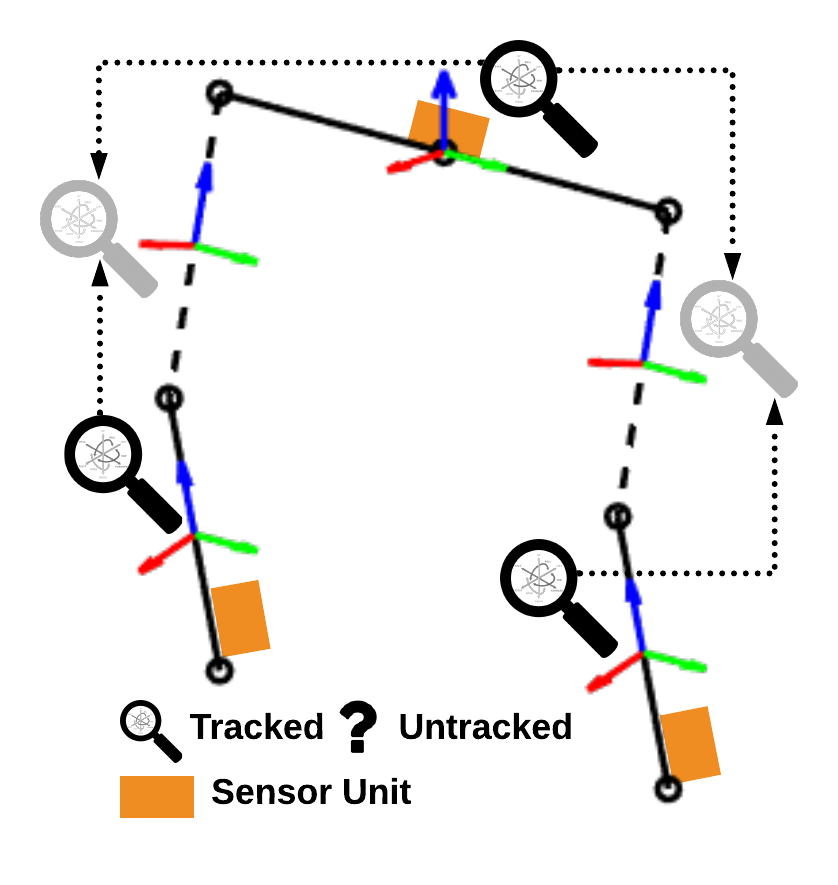
Sparse Constrained KF (CKF)
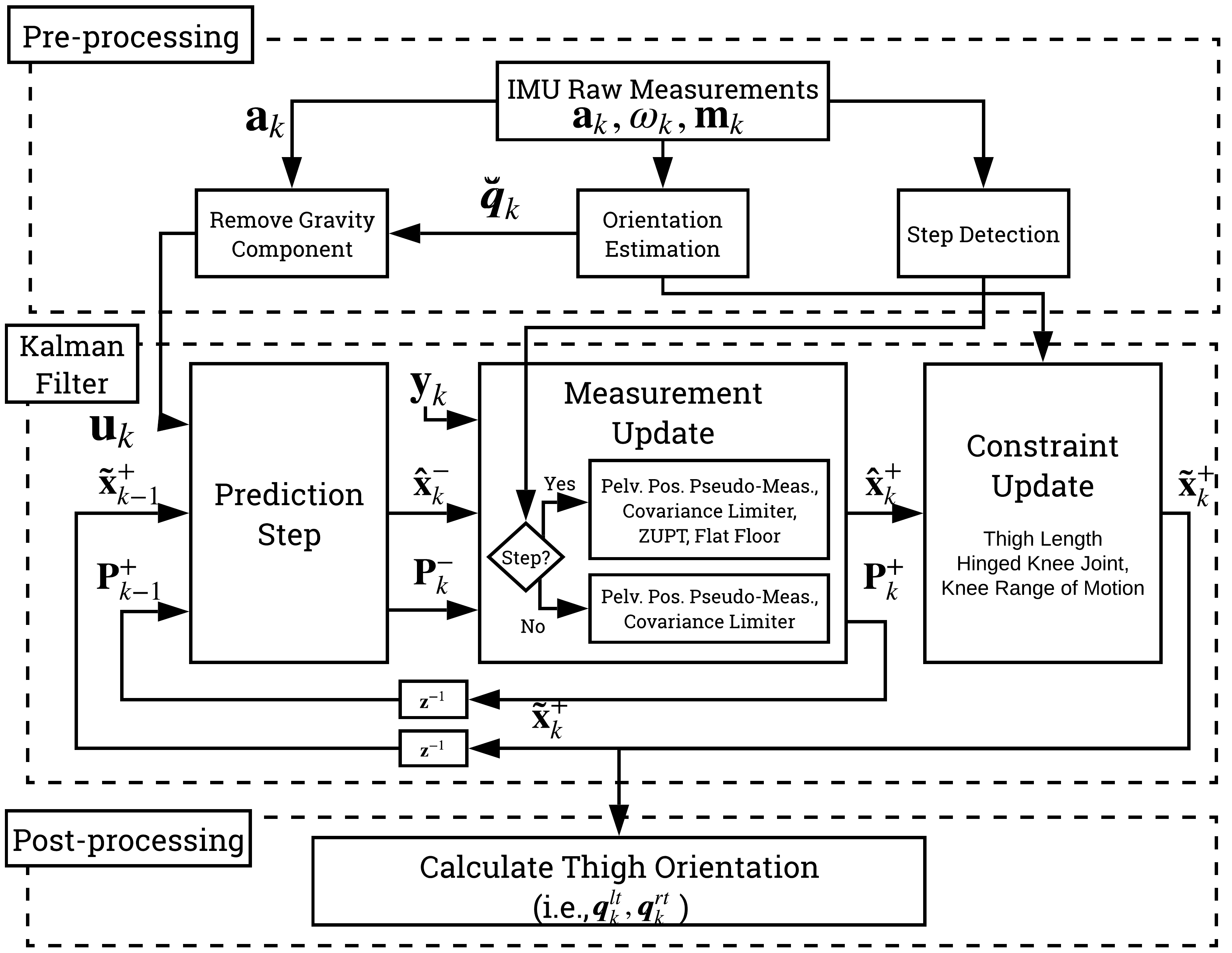
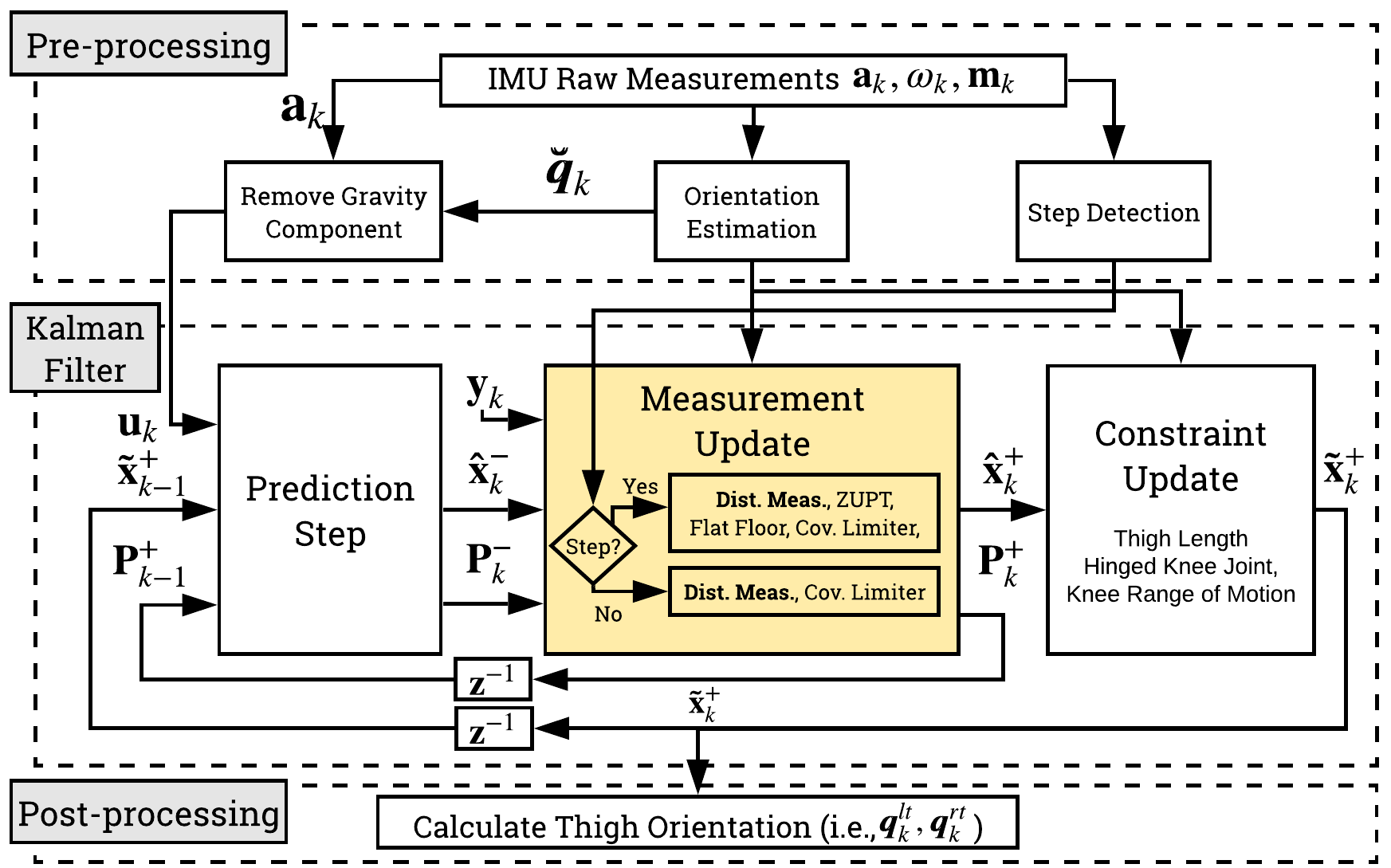
Algorithm overview of prior work
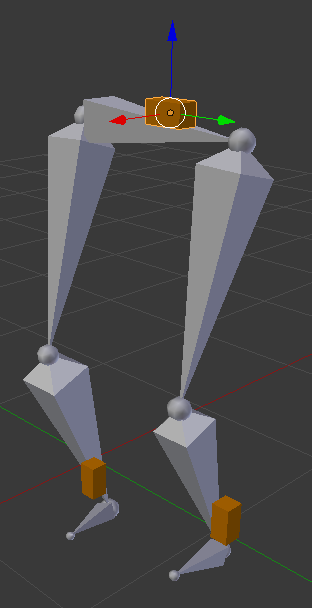
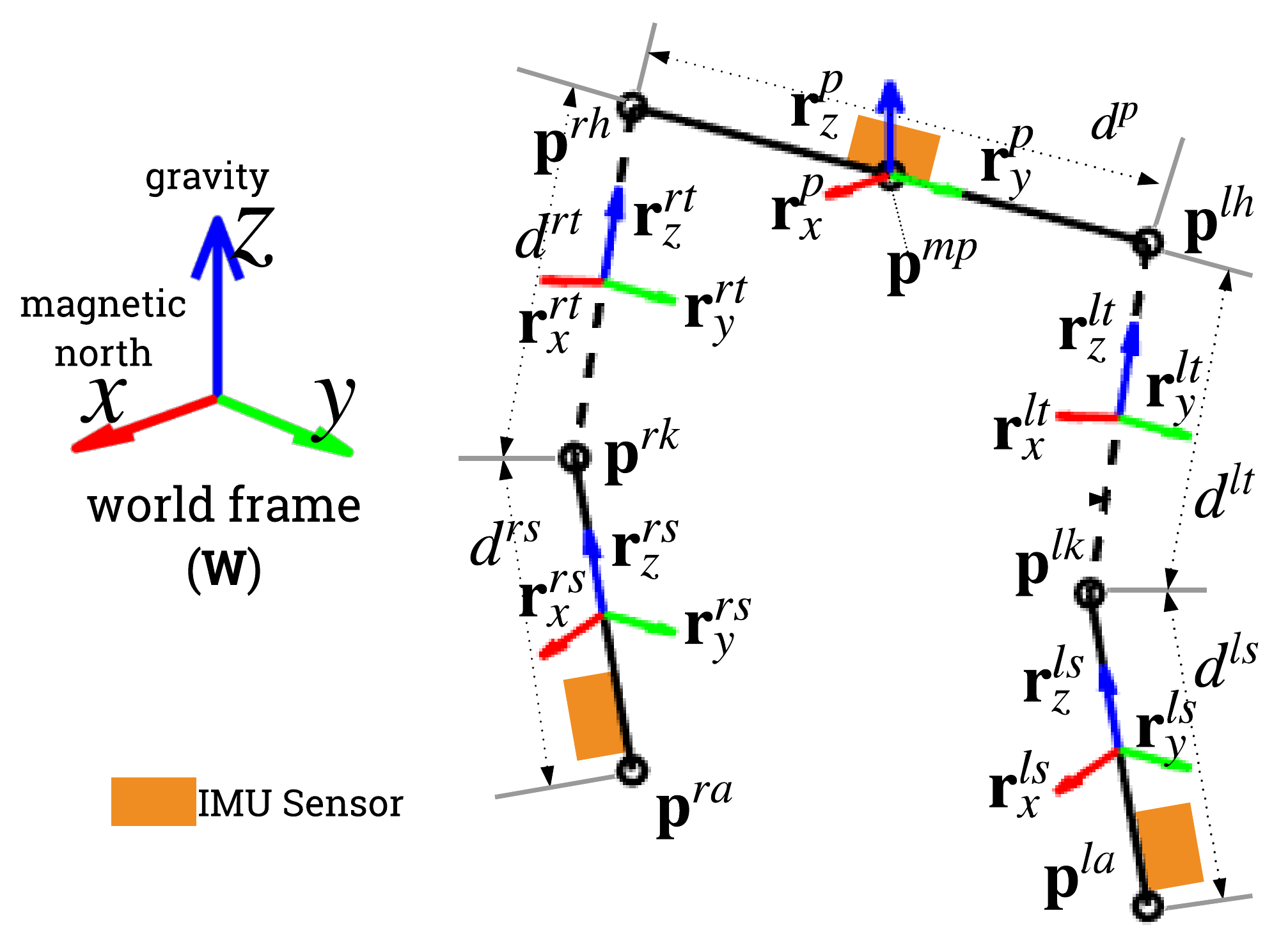
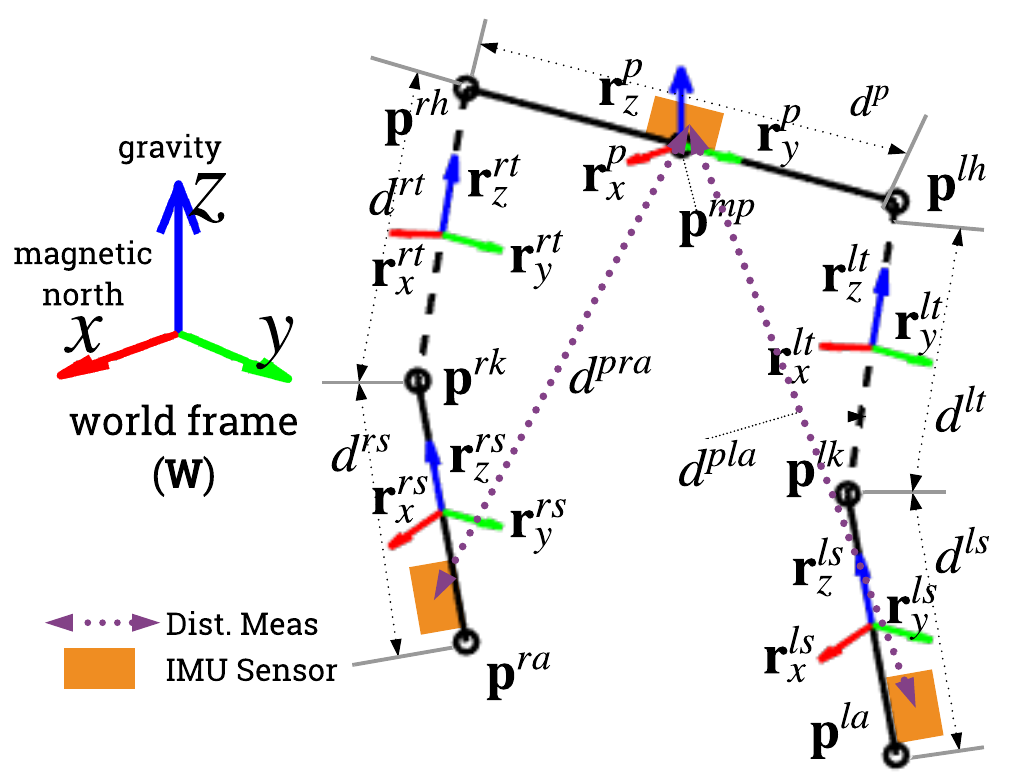
Body Model:
Pred.
Meas.
Cstr.
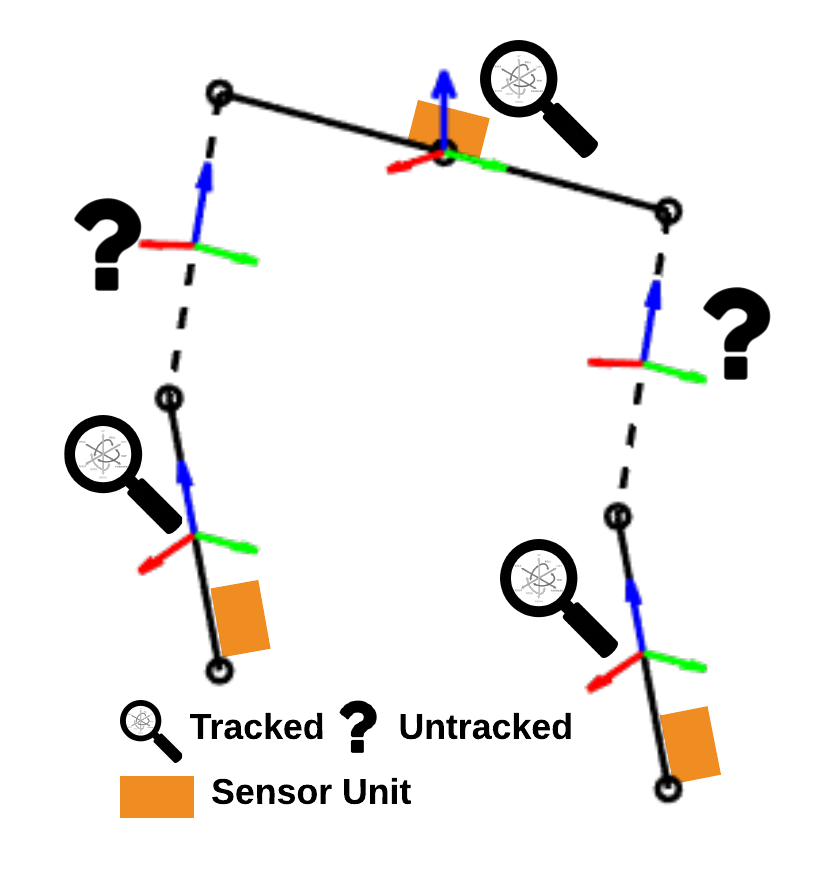
Sparse CKF - Sample
Sparse CKF - Weakness
To make it work, we need to make assumptions that may not be practical for certain movements (e.g., Activities of Daily Living or ADLs).
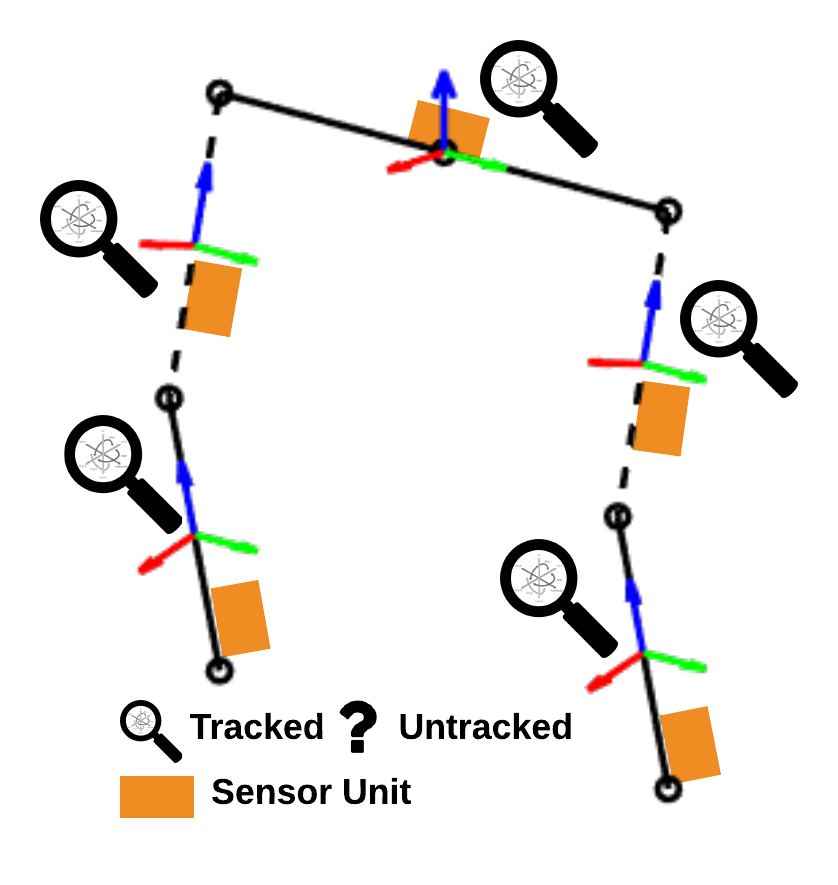
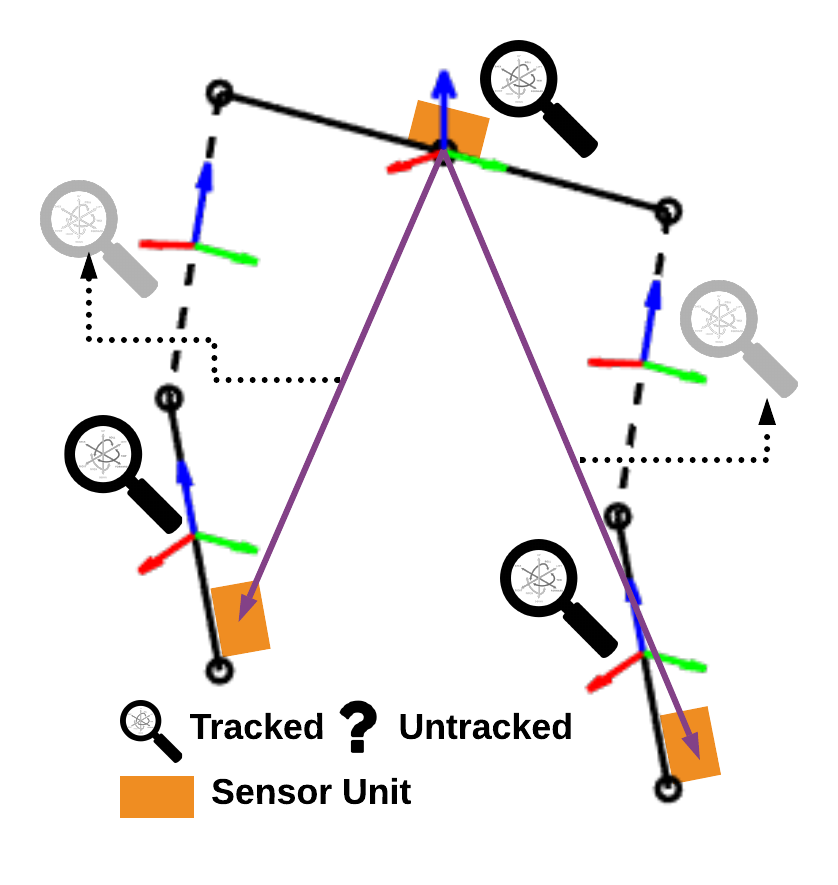
Sparse CKF + Distance
Overview
Distance measurement which can be obtained through ultrasonic or ultra-wide band radio (UWB).
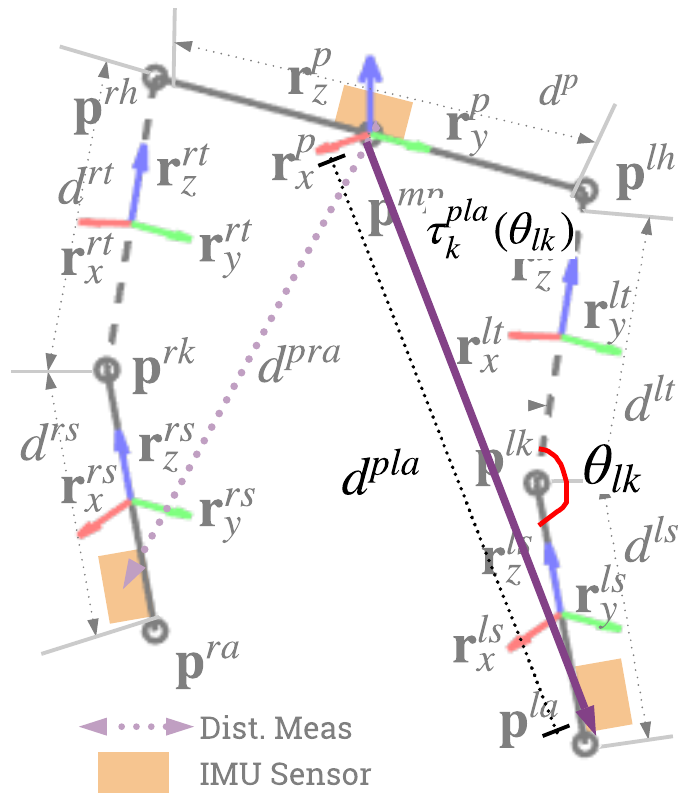
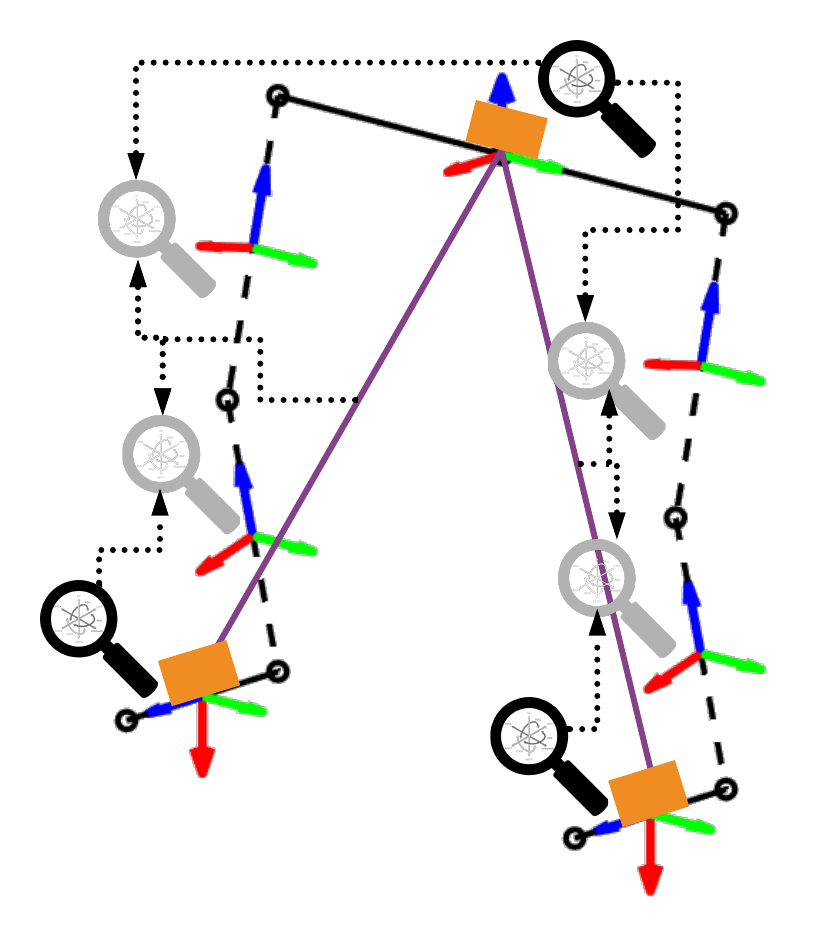
Body Model:
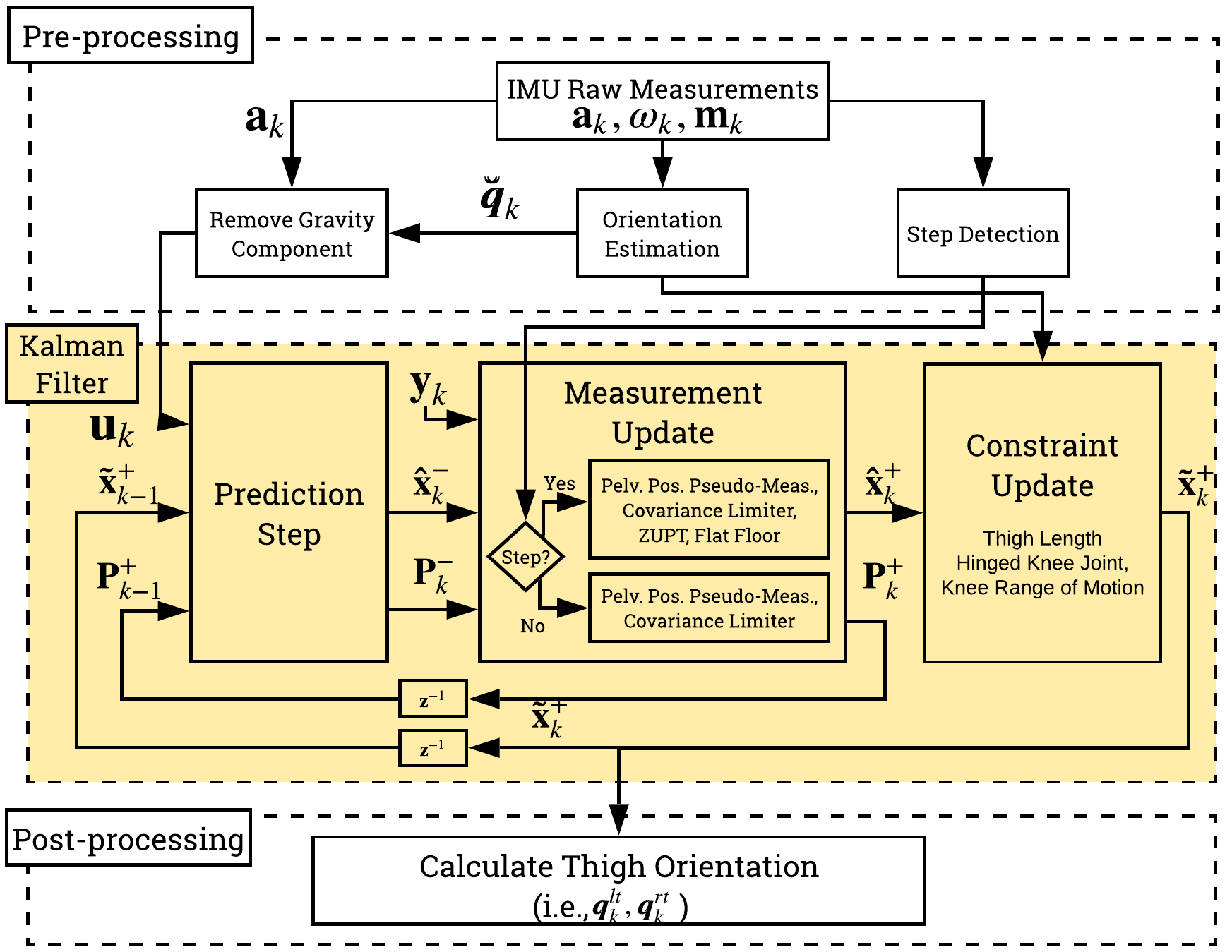
Sparse CKF + Distance
Remove pelvis related assumptions. Additional measurement model.
H(x)=τplak(ˆθlk)τplak(θlk)=ψ, hip + shanks⏞dp2rpy−dlsrlsz+Λ, thigh⏞dltrlsxsin(θlk)−dltrlszcos(θlk)(ˆdpla)2=τplak(θlk)2=ψ2+2ψ⋅Λ+(dlt)2αcos(θlk)+βsin(θlk)=γα=−2dltψ⋅rlsz,β=2dltψ⋅rlsxγ=(ˆdpla)2−ψ2−(dlt)2ˆθlk=cos−1(αγ±β√α2+β2−γ2α2+β2)
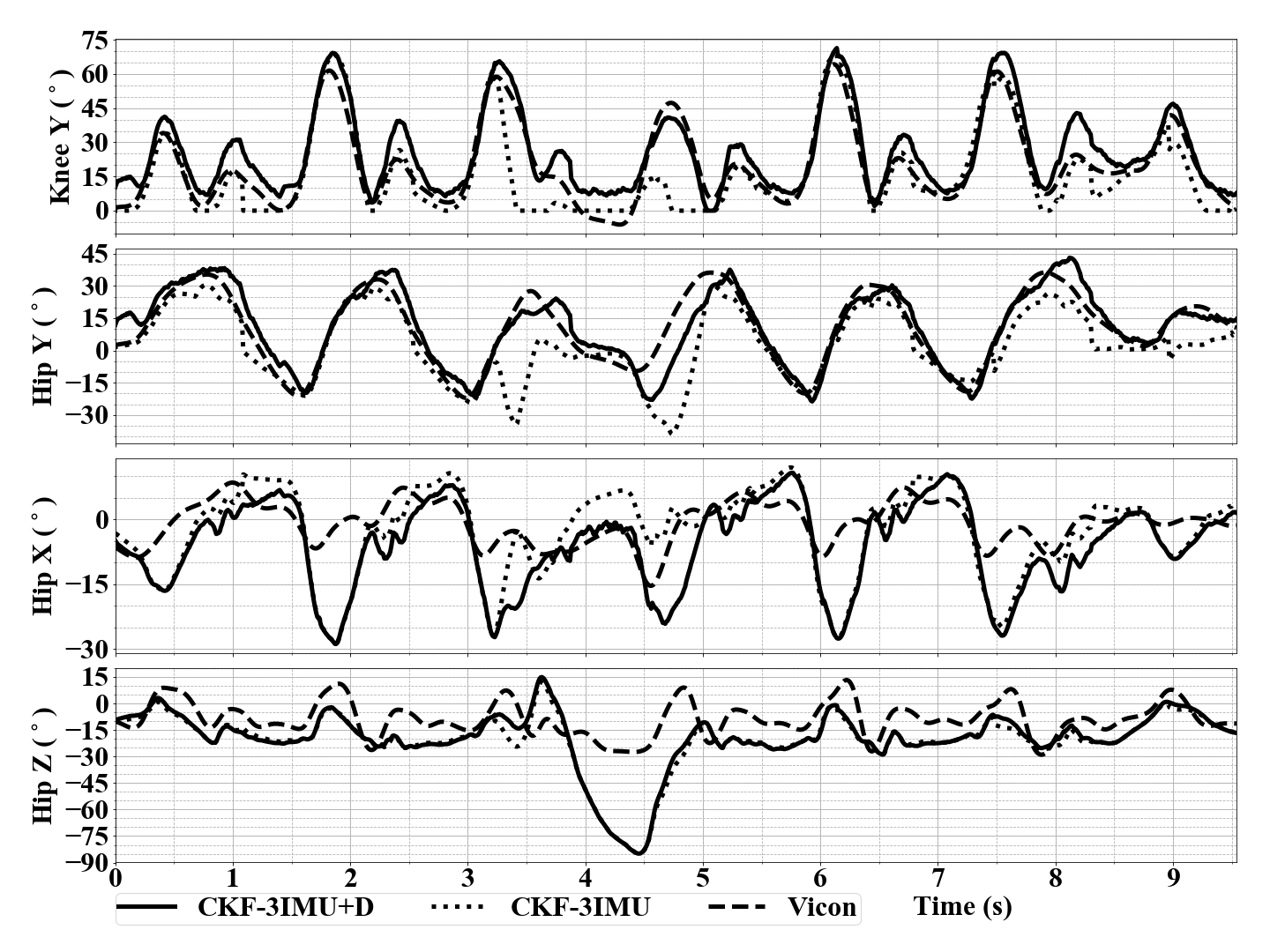
Sparse CKF+D - Sample
Tested on actual IMU data + simulated distance measurement from Sparse CKF dataset (walking, jumping jacks, speedskater, TUG, jog).
Most deviation is at the turning motion (t=3.5−5s).
Sparse CKF+D - Sample
Dramatic increase in performance in dynamic movements. Captures Sagitall knee angles better.
Sparse CKF+D - Sample
Is able to locate relative position better. Note: TUG = Timed Up and Go.
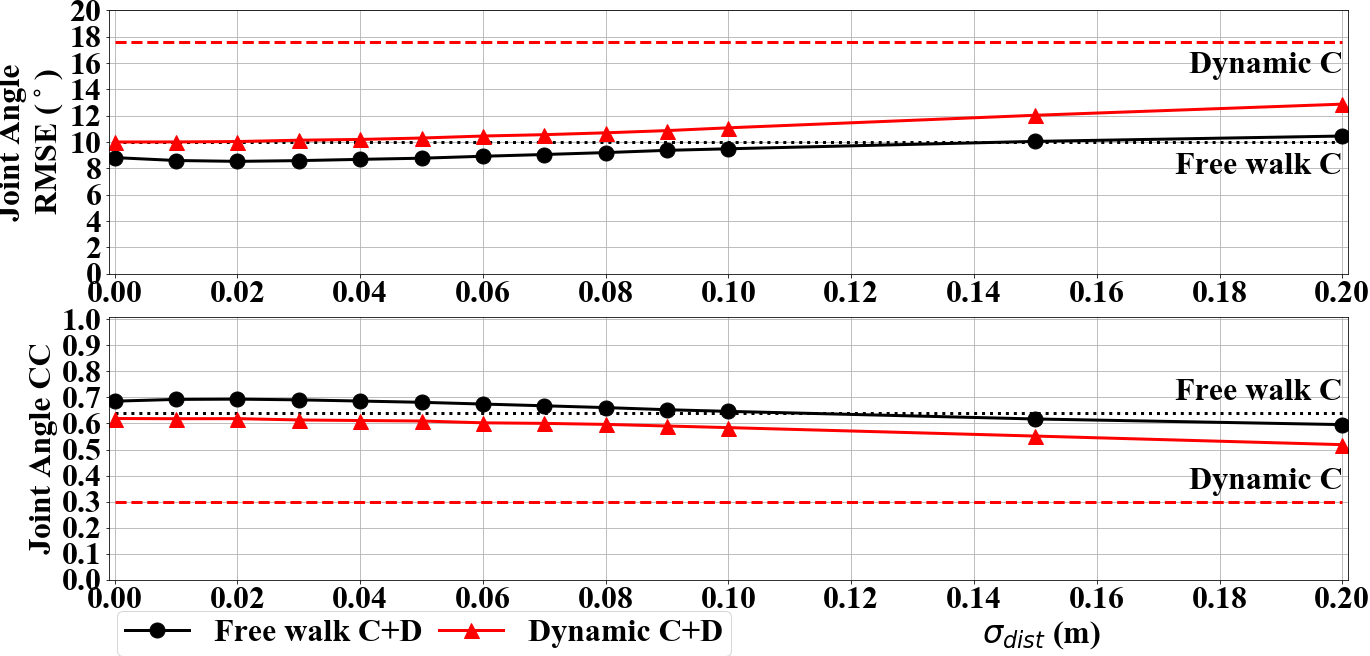
Sparse CKF+D - Varying σ
Simulated at different levels of distance measurement noise σ (assumed gaussian). Useful from σ≤0.1 m for walking. Useful from σ≤0.2 m for dynamic movements.
Conclusion & Future Work
Adding distance measurement is indeed a promising approach
Can be implemented using ultrasound or Ultrawideband (UWB) based sensors.
Simulated distance measurement needs actual validation.
Interesting to try with better models and tracking more segments.
Infer from distance. Lie Group based 7 segment
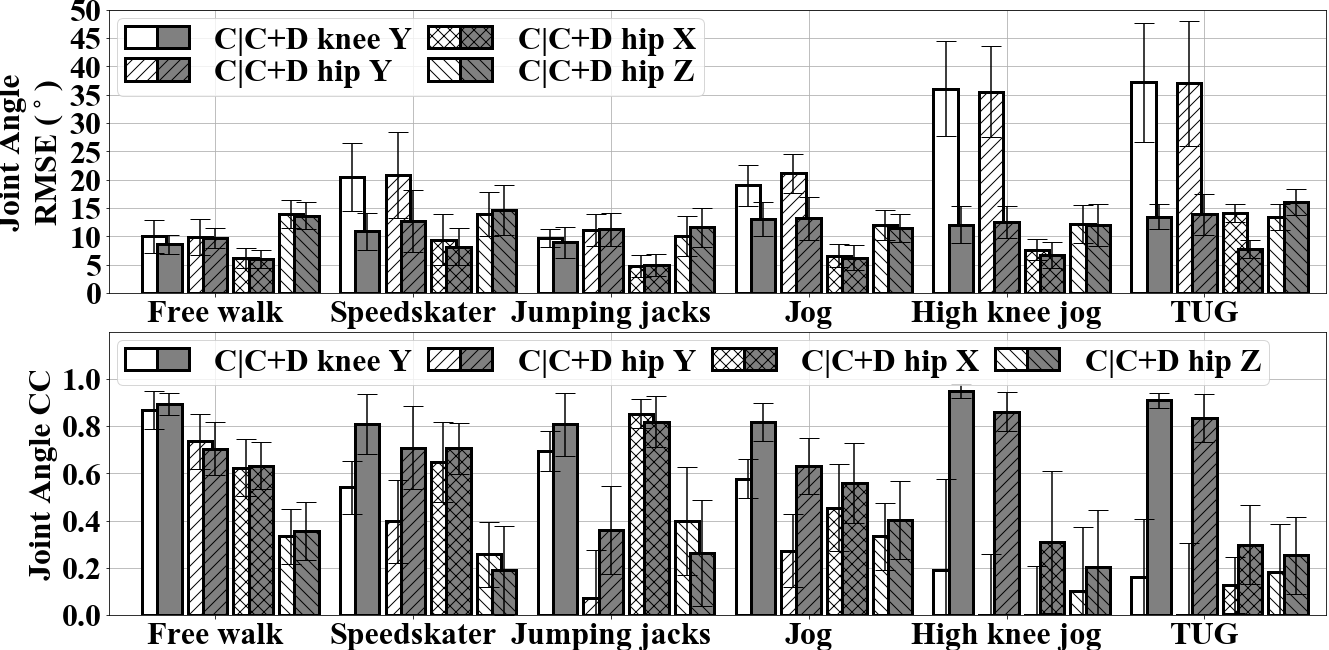
Appendix - CKF+D Quant. Results
Tested on actual IMU data + simulated distance measurement from Sparse CKF dataset (walking, jumping jacks, speedskater, TUG, jog).
Estimating Lower Limb Kinematics using Distance Measurements with a Reduced Wearable Inertial Sensor CountLuke Wicent Sy, Nigel Lovell, Stephen Redmond