Intro to Wearable Robotics
Part 1 - CAD Design of an Exo Arm
IEEE UNSW Student Branch
Luke Wicent Sy
About me
- BS Electronics, MS Com Sci, PhD student Biomed
- Wearable tech. on capturing human motion
- Member of UNSW Medical Robotics Lab
- Website: https://www.lukesy.net/
Why wearable robotics?

Why wearable robotics?
Why wearable robotics?
Pros and Cons
- Tedius calibration (2-3 session x (10-30 min + >1 hours))
- For spinal cord injury application, 0.2 m/s vs average walking speed of 1.4 m/s.
- Bad for the already weak patient. Less exercise = limited range of motion, weakbone health, and prone to pressure injuries.
- Requires a well-trained caregiver and very prohibitive cost
Project overview
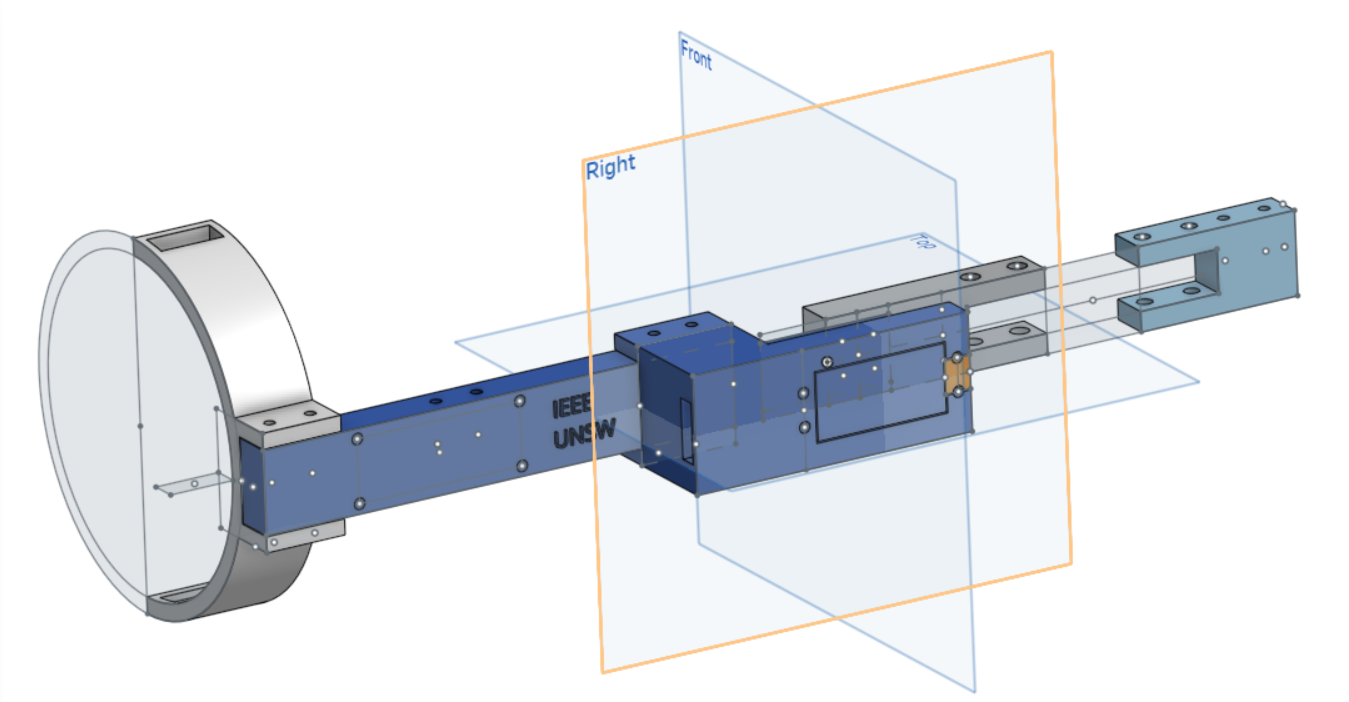
- CAD Design of an Exo Arm
- Microcontroller Programming to control an Exo Arm
- Exo Arm to Computer Interface
Project overview
3D Printing
- Easily available (UNSW Makerspace!)
- Allows for quick and customizable prototyping
What we will do today?
- Register to OnShape (online CAD)
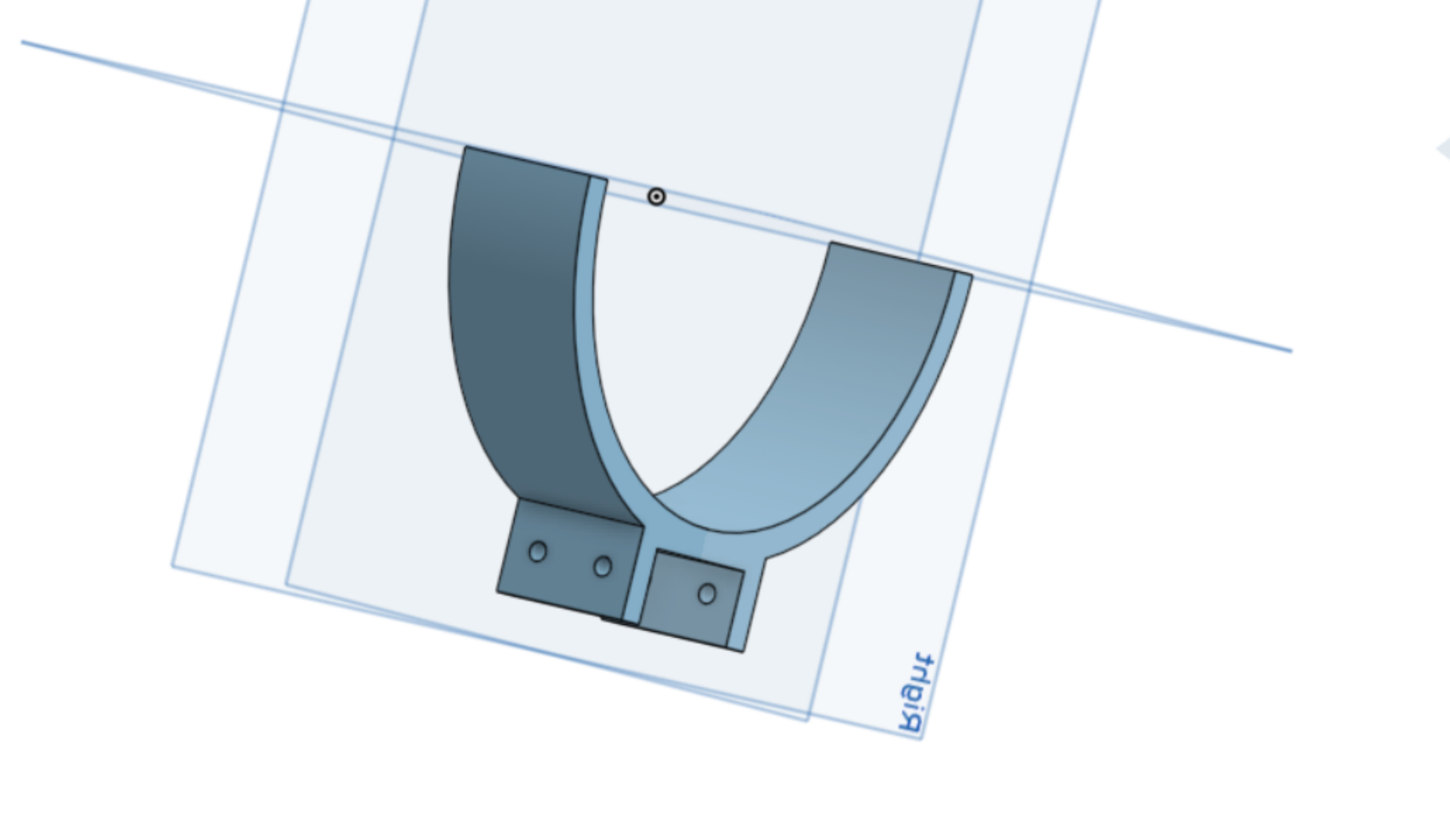
- Make a cuff model
- [Challenge] Build the whole arm!
What we will do today?
- Register to OnShape (online CAD)
- Make a cuff model
- [Challenge] Build the whole arm!
Groupings
- Separate into four groups.
- The workshop is ideally done individual or by pairs.
- If stuck, consult your group.
- If still stuck, consult the workshop handler (i.e., me)!
- DO IT YOURSELF. DON'T PEAK AT THE SOLUTION.
- Will do a demo mid way if still stuck.
CAD Design of cuffs
PDF: https://git.io/Je8mz WEB: http://bit.ly/2BMewEP
If you finish early,
- Like us on Facebook (@IEEEUNSWSB)
- Add us on SpArc (FREE)
- Do the extra challenge!
- Give us feedback! http://bit.ly/2Jp5KkA
- Ask the UNSW medical robotics lab pips (if they're here) about their research!