Estimating Lower Limb Kinematics using a Lie Group Constrained EKF and a Reduced Wearable IMU Count
Abstract
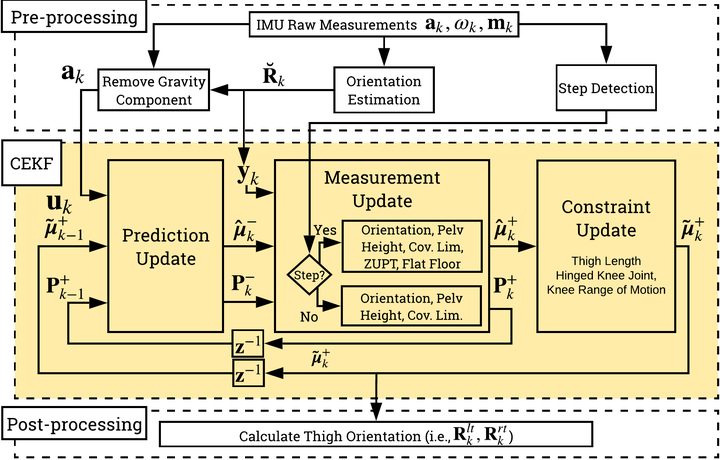
This paper presents a novel algorithm using Lie group representation of position and orientation alongside a constrained extended Kalman filter (CEKF) to accurately estimate pelvis, thigh, and shank kinematics during walking using only three wearable inertial sensors. The algorithm iterates through the prediction update (kinematic equation), measurement update (pelvis height, zero velocity update, flat-floor assumption, and covariance limiter), and constraint update (formulation of hinged knee joints and ball-and-socket hip joints). The paper also describes a novel Lie group formulation of the assumptions implemented in the said measurement and constraint updates. Evaluation of the algorithm on nine healthy subjects who walked freely within a $4 \times 4 $ m$^2$ room shows that the knee and hip joint angle root-mean-square errors (RMSEs) in the sagittal plane for free walking were $10.5 \pm 2.8^\circ$ and $9.7 \pm 3.3^\circ$, respectively, while the correlation coefficients (CCs) were $0.89 \pm 0.06$ and $0.78 \pm 0.09$, respectively. The evaluation demonstrates a promising application of Lie group representation to inertial motion capture under reduced-sensor-count configuration, improving the estimates (i.e., joint angle RMSEs and CCs) for dynamic motion, and enabling better convergence for our non-linear biomechanical constraints. To further improve performance, additional information relating the pelvis and ankle kinematics is needed.
Other resources
Luke Sy
PhD Candidate
My research interests include state estimation, robotics, wearable sensors, machine learning, and biomedical engineering.