Estimating Lower Limb Kinematics Using Distance Measurements with a Reduced Wearable Inertial Sensor Count
Abstract
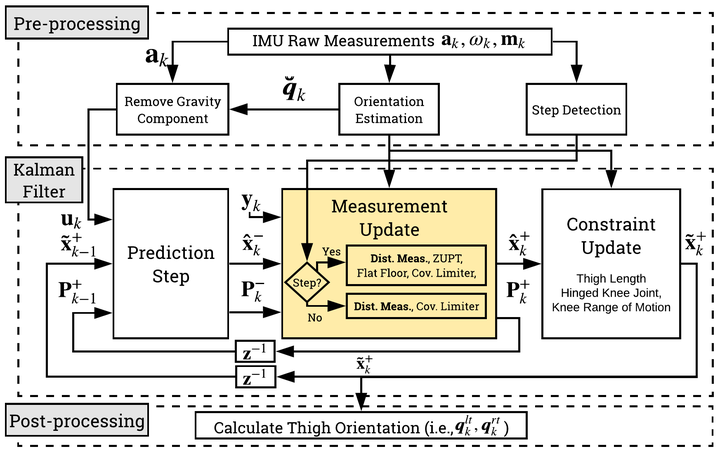
This paper presents an algorithm that makes novel use of distance measurements alongside a constrained Kalman filter to accurately estimate pelvis, thigh, and shank kinematics for both legs during walking and other body movements using only three wearable inertial measurement units (IMUs). The distance measurement formulation also assumes hinge knee joint and constant body segment length, helping produce estimates that are near or in the constraint space for better estimator stability. Simulated experiments have shown that inter-IMU distance measurement is indeed a promising new source of information to improve the pose estimation of inertial motion capture systems under a reduced sensor count configuration. Furthermore, experiments show that performance improved dramatically for dynamic movements even at high noise levels (e.g., $\sigma_{dist} = 0.2$ m), and that acceptable performance for normal walking was achieved at $\sigma_{dist} = 0.1$ m. Nevertheless, further validation is recommended using actual distance measurement sensors.
Other resources
Luke Sy
PhD Candidate
My research interests include state estimation, robotics, wearable sensors, machine learning, and biomedical engineering.